可重构微型集群机器人,点亮未来医疗与环境修复

摘要
移动微型机器人可以导航、感知环境并与其环境交互,可能会彻底改变生物医学和环境修复。许多自组织的微型机器人集群已经被开发出来,来克服单个微型机器人的驱动、传感和操纵的固有限制;然而,在行为转换之间具有鲁棒性的可重构集群很少见。这种具有多种功能的系统有利于在复杂环境中运行。近期发表于 Nature Communications 的一项新研究提出了一种多功能的微型机器人集群系统,能够按需重新配置,以适应和利用其环境,在空气-水界面执行各种功能。该系统展示了从各向同性到各向异性等多种不同模式,以及全局驱动和自推进行为之间的转换。研究者们展示了实验和模拟中不同模式之间的转换,并演示了如导航、物体运输和与环境交互等功能。这种具有全局驱动和自主行为的多功能微型机器人在未来的医疗和环境应用中具有很大的潜力。
研究领域:自组织,集群机器人

胡聪 | 作者
邓一雪 | 编辑

论文题目:
Microrobot collectives with reconfigurable morphologies, behaviors, and functions
论文链接:
https://www.nature.com/articles/s41467-022-29882-5#Abs1
1. 微型集群机器人
1. 微型集群机器人
自然界中的集群性物种通常可以改变群体的形态来适应环境,并完成复杂的功能,比如蜜蜂、蚂蚁、鸟群等。受这些物种的启发,工程师们通过模仿自然界,设计了可编程集群机器人与环境进行交互,以实现具有鲁棒性的行为重构。
宏观尺度的集群机器人行为重构较为常见,无人机群就是其中一种。但微米尺度的集群机器人行为重构是较为罕见的,这种微型集群机器人具有生物医学与环境修复方面的潜力。在微观尺度下,行为重构的方式主要有两种:外部环境刺激(物理和化学作用)产生的全局驱动响应,还有活性粒子的自我驱动响应。自驱动指个体对附近的行为作出反应,全局驱动指系统对外部的声、光、磁等刺激做出反应。其中磁场刺激应用较为广泛,比如MIT的赵选贺教授发明的磁控软体机器人,可以用来清除血栓。
此前已经有很多关于磁控微型集群机器人的研究,但要么行为模式单一、要么不能在不同模式之间实现鲁棒性的转换。一个理想的系统应该能够使用外部控制参数(如磁场频率),来动态地规划不同粒子-粒子、粒子-环境相互作用,并在几个模式及其功能之间自由转换。
最近发表于 Nature Communications 的新研究提出了一种微盘集群机器人,由大约120个在流体-空气界面的微盘组成。该系统通过磁场控制与自驱动展现出六种行为模式,并能组合不同的模式以实现多种功能,比如路径规划、物体运输等。微盘集群机器人非常适合实际应用,并可以拓展到三维空间中用于医学治疗,比如活性药物运输等。
通过链模式写出MPIC四个字母
通过静态、旋转与链模式实现接触式运输小球
2. 六种不同的行为模式
2. 六种不同的行为模式
该研究中的所有集体行为模式都是由空气-水界面处的磁性微盘集群产生的,这些磁盘由全局时变均匀磁场驱动。不同的磁场结构使集群处于静态、旋转、振荡等6种行为模式。除了磁场的控制作用外,粒子与粒子、粒子与环境之间还有相互作用(例如流体动力、偶极子相互作用与表面张力)。该系统展现出各向同性与各向异性的行为,并能在不同行为模式之间相互转化(比如从全局驱动模式转化为自驱动)。
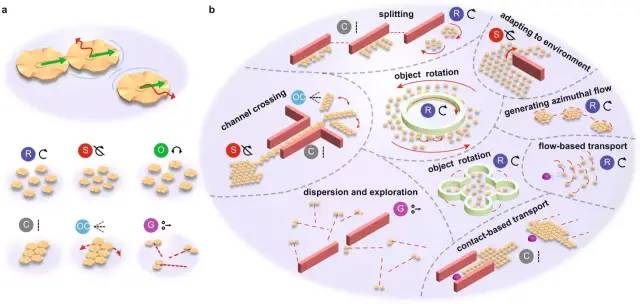
图1. 微型集群机器人可重构行为和功能。(a)外部磁场驱动的三个微盘表现出的作用力(上)。六种模式:旋转R、静态S、振荡O、链C、振荡链OC、含自推进对的类气体模式G(下)。(b)集群模式之间过渡以执行各种功能。
(1)旋转模式R
每个微盘以与外部磁场相同的角速度围绕自己的轴线旋转。每个旋转的微盘都会产生一个方位流场,这使得集群能够围绕一个共同的质心运行。每个圆盘的旋转速度和圆盘间的流体力学排斥力随着频率的增加而增加。
(2)静态模式S
其中每个盘的质心相对于全局参考框架保持静态,但盘围绕自己的中心轴摆动。微盘随时间改变其振荡方向和角速度,在固定位置上振荡,并通过时变的成对相互作用与相邻的微盘相互作用,这在短期内抵消了任何流体运动,使集群保持静态。
(3)振荡模式O
磁盘在短期内保持恒定的旋转方向,但角速度会产生波动。驱动信号可以使整个集群以时变的角速度在顺时针和逆时针旋转之间周期性地切换。静态模式和振荡模式的关键区别在于,振荡模式的周期要长得多。这就造成了短时观察时振荡模式在一个方向上的均匀旋转,而这种模式的平均长时角速度仍然小于旋转模式的角速度。
(4)链模式C
链状结构的形成是整个集群中微盘同步定向振荡、每个微盘产生的流动,以及该流动对邻近成分影响的结果。虽然从直觉上看,静态磁场似乎可以用来创建链,但这个系统需要一个振荡磁场。
(5)含自推进对的类气体模式GaSPP
微盘对垂直于连接其各自中心的线平移。它们的平移速度随频率增加,一旦微盘对与边界或其他微盘碰撞,平移速度就会降至零。这时微盘会有两种可能行为:永久或暂时地分开;或者与其他微盘重新结合成为一对,向新的方向平移。
这些行为模式的实现是通过不同的磁场模式来实现的,比如磁场轨迹为圆形时产生旋转模式,轨迹为抛物线时产生静态模式,如图2所示。
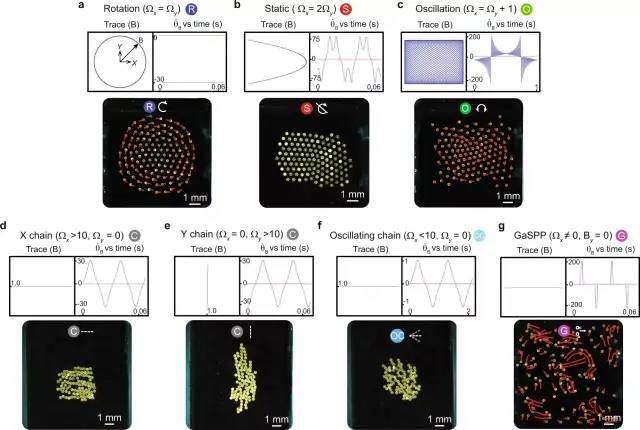
图2. 6种不同集群行为演示。a-g 分别为旋转R、静态S、振荡O、链C(X和Y方向)、振荡链OC、含自推进对的类气体模式G。磁场矢量方向为 Trace(B),磁场矢量相对于x轴的偏导为![]() 。(a-g)中的实验图像上面的符号代表了该集群所表现出的模式。这些符号对应于图1a中所示的符号。Ωx和Ωy分别是外部磁场沿x和y轴的振荡频率。
。(a-g)中的实验图像上面的符号代表了该集群所表现出的模式。这些符号对应于图1a中所示的符号。Ωx和Ωy分别是外部磁场沿x和y轴的振荡频率。
模式转换是通过仿真与实验来证明的。集群从旋转模式过渡到静态模式,接着过渡到振荡模式,然后从各向同性的振荡模式过渡到各向异性的Y链。Y型链通过改变磁场方向变为X型链,然后集群切换到振荡链,其中每个链围绕X轴振荡,随后从全局驱动振荡链过渡到自推进类气体模式,其中微盘通过GaSPP模式分散,并在更高频率下过渡到旋转模式。最后,集群通过静态模式向中心塌陷,并形成一个固定的六边形结构。
3. 运用不同行为模式的功能演示
3. 运用不同行为模式的功能演示
该研究使用不同的集群模式展示了丰富的的功能。这些演示通过磁场梯度的变化,使微盘集群能够在复杂环境中进行集群运动和导航,并能够实现接触式物体传输、非接触物体运输、路径规划与避障、物体旋转等功能。这些演示展示了集群通过流体介质操纵自身和周围环境的能力,这包括流动引起的运动、物体运输、物体旋转和方向控制。
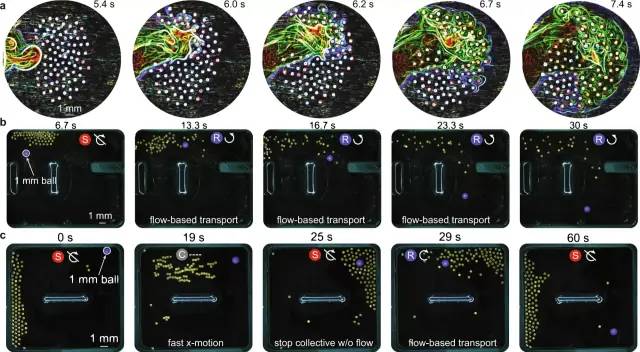
图3. 流体辅助无接触物体运输(a)集群旋转时微盘周围流动的定性演示。绿色和蓝色的线条是用边缘检测法提取的。(b) 集群旋转引导一个紫色的球到右下角。(c)集群旋转通过使用场地设计引导一个球在场地周边流动。(b, c)中的子图像在底部标明了集群所执行的功能。
图3a中使用了一种荧光染料,该染料被引入顺时针旋转的集合体的左侧,并通过其自身的扩散运动和集合体产生的方位角流进行运输。仔细观察这些图像可以发现,染料围绕单个微盘的边缘旋转,并被方位角流扫到其他附近的微盘上。通过旋转模式实现无接触物体传输。图3b展示集群通过旋转,将聚苯乙烯球(1 毫米)从场地的顶部中心移动到右下角。集群以逆时针方向旋转,产生流场使球运动,从而将球输送到球馆右下角。图3c是使用链模式,也是通过非接触运输,将球移动到场地的右下角。已经证明,集群可以通过基于接触和非接触的机制运输大型球形物体。
综上所述,该微盘集群机器人系统通过可调节磁场产生六种行为模式。系统可以在不同的行为间自由转换,并通过这些行为模式的组合可以实现复杂功能,如非接触与接触式物体运输、路径规划与避障等,具有广阔的生物医学与环境修复应用前景。
论文 Abstract
复杂科学最新论文
集智斑图顶刊论文速递栏目上线以来,持续收录来自Nature、Science等顶刊的最新论文,追踪复杂系统、网络科学、计算社会科学等领域的前沿进展。现在正式推出订阅功能,每周通过微信服务号「集智斑图」推送论文信息。扫描下方二维码即可一键订阅:
推荐阅读
-
长文综述:集群机器人的过去、现在与未来 -
集群机器人的应用有哪些?| 集智百科 -
PRL速递:机器人模拟活性物质集群的群体行为涌现 -
《张江·复杂科学前沿27讲》完整上线! -
成为集智VIP,解锁全站课程/读书会 -
加入集智,一起复杂!
点击“阅读原文”,追踪复杂科学顶刊论文
微信扫一扫,分享到朋友圈











