机器人集群如何组装出有趣形状?| Nat. Commun. 速递

关键词:机器人集群,集体行为,形状组装行为


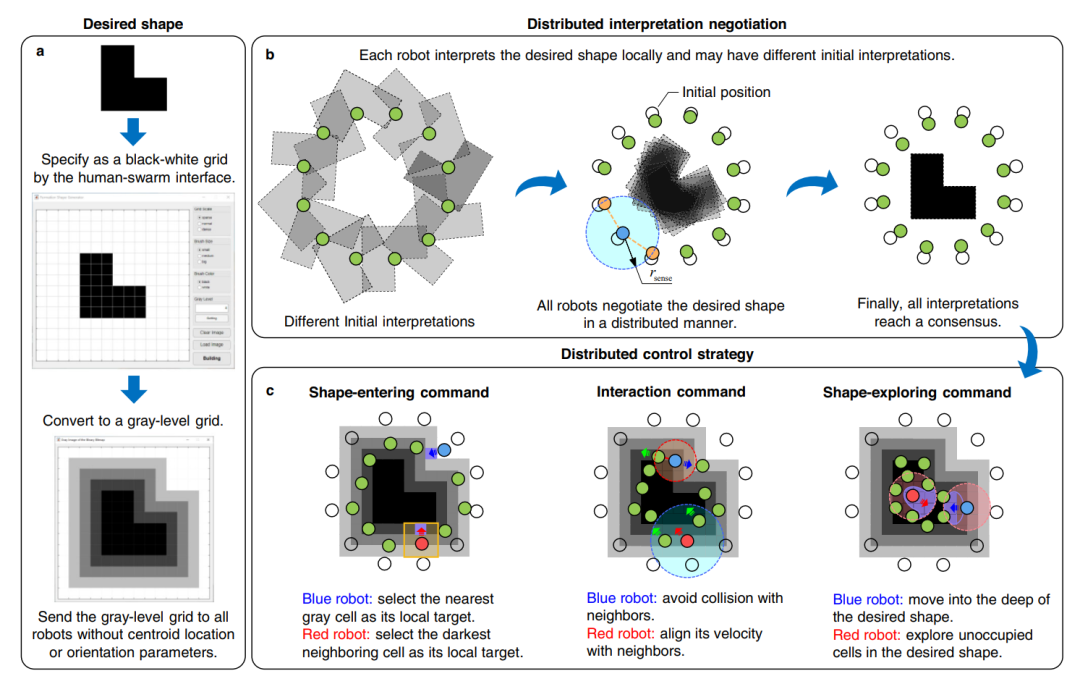
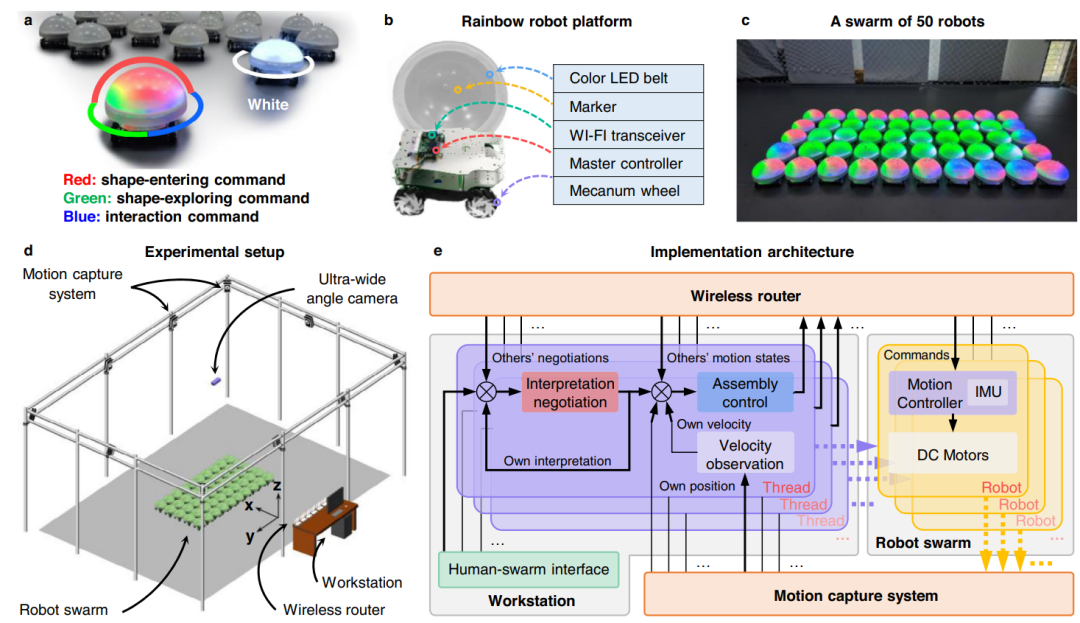
论文题目:Mean-shift exploration in shape assembly of robot swarms 论文来源:Nature Communications 论文链接:https://pattern.swarma.org/paper/d2695148-09b8-11ee-8093-0242ac17000d
复杂科学最新论文
推荐阅读
微信扫一扫,分享到朋友圈

关键词:机器人集群,集体行为,形状组装行为
论文题目:Mean-shift exploration in shape assembly of robot swarms 论文来源:Nature Communications 论文链接:https://pattern.swarma.org/paper/d2695148-09b8-11ee-8093-0242ac17000d
复杂科学最新论文
推荐阅读










