Nat. Machi. Intell.速递:面向自主机器人的层次生成建模

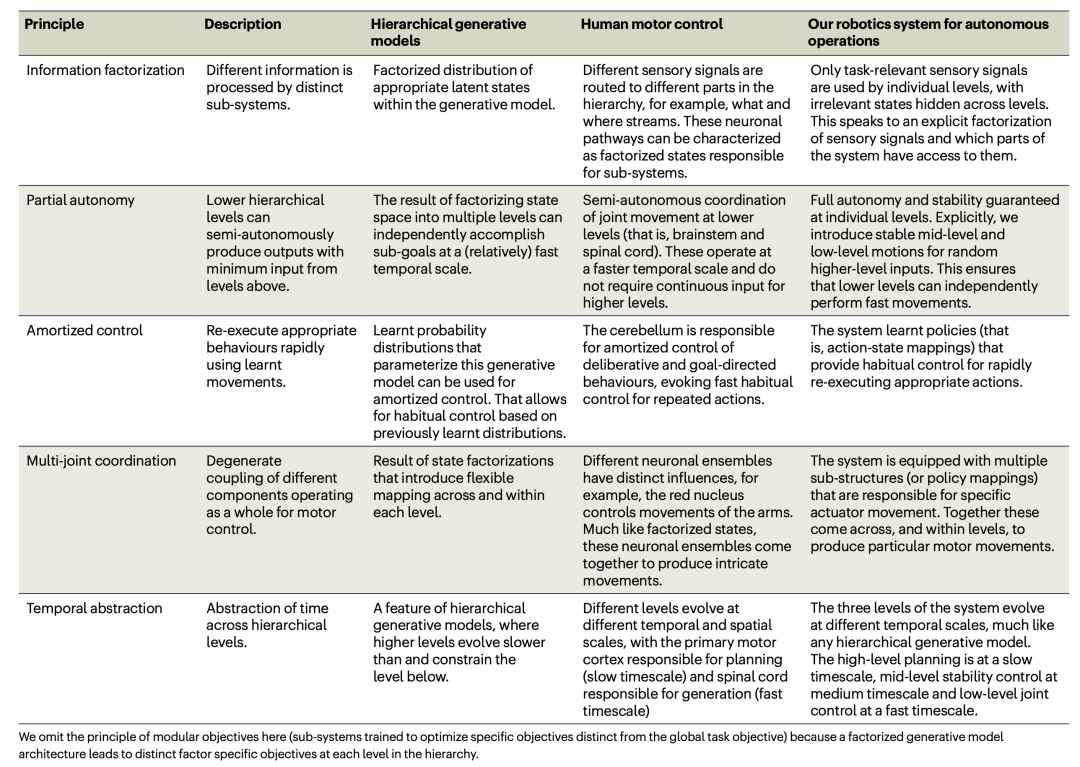
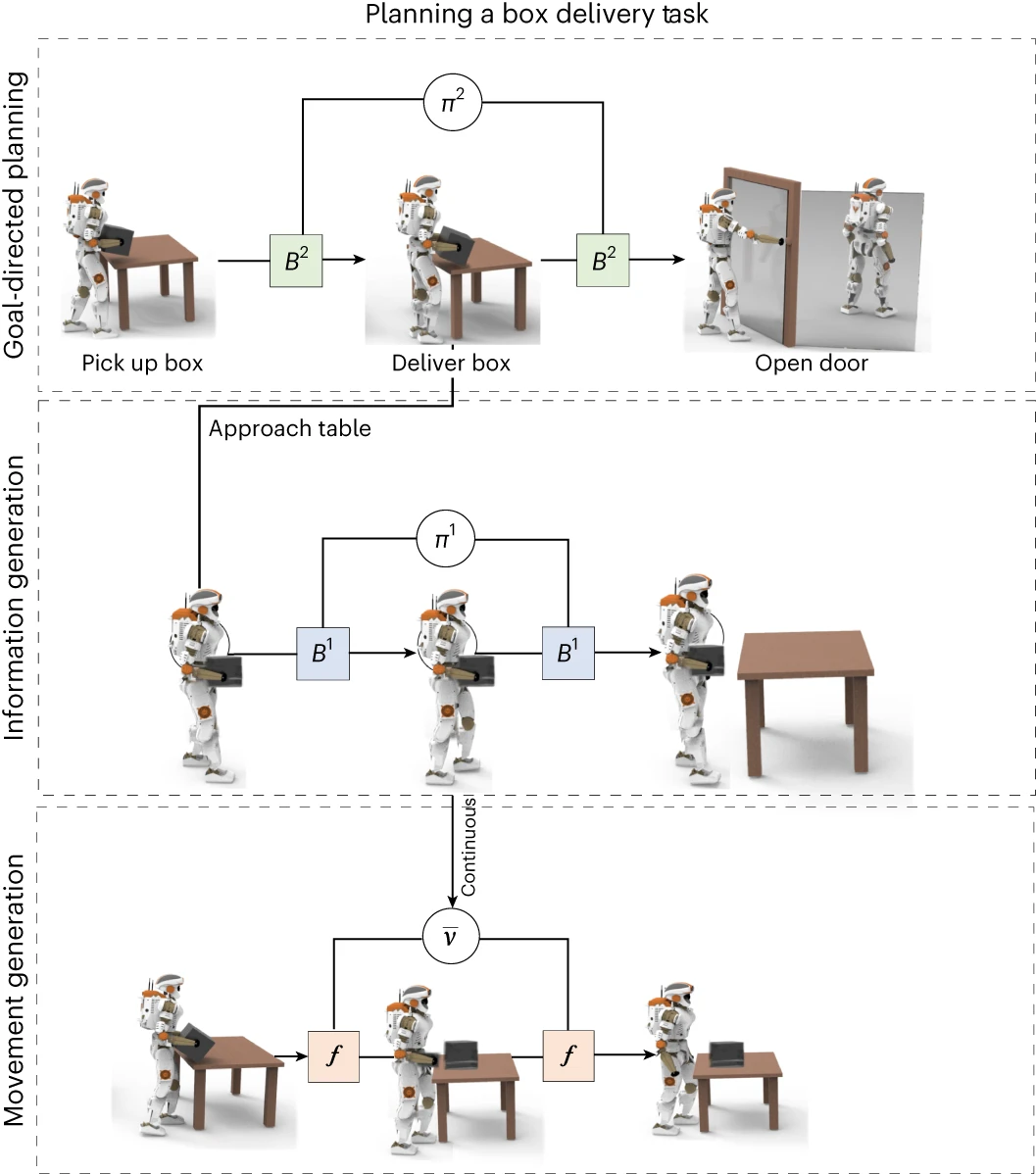
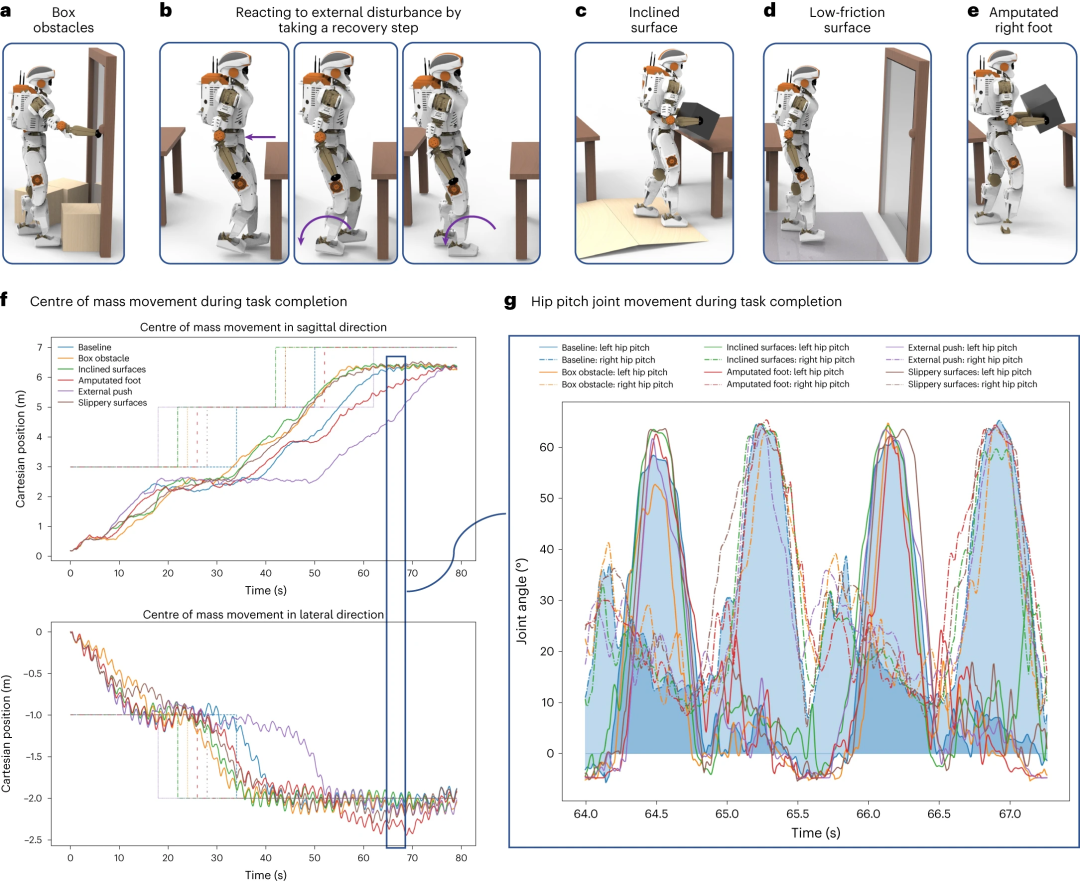
关键词:具身人工智能,分层生成模型,机器人学,运动控制,嵌套时间尺度

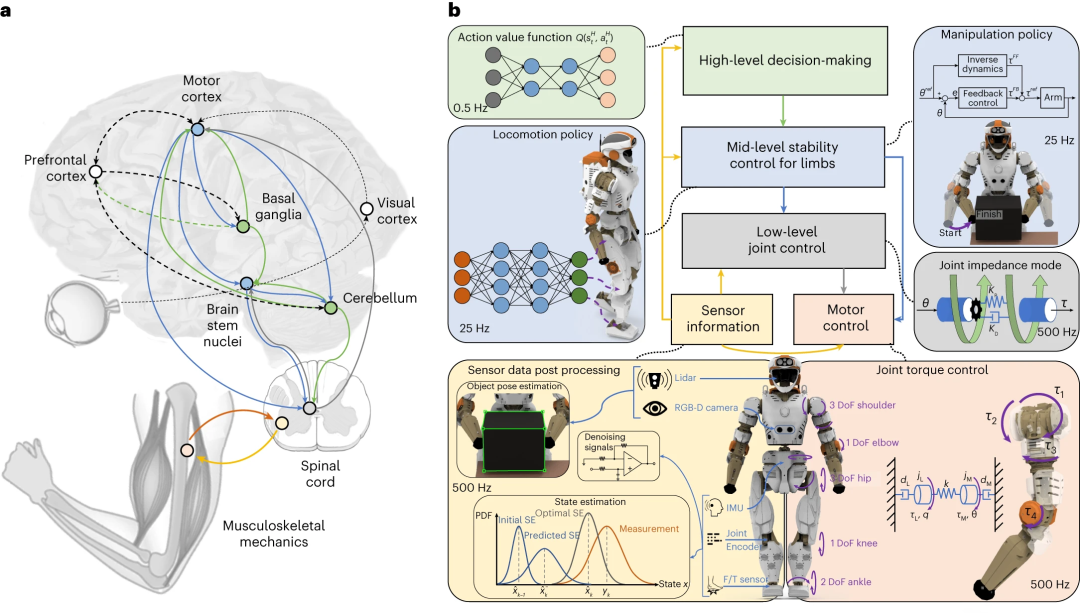
论文题目:Hierarchical generative modelling for autonomous robots 论文来源:Nature Machine Intelligence 论文链接: https://www.nature.com/articles/s42256-023-00752-z
AGI读书会

详情请见:
推荐阅读
微信扫一扫,分享到朋友圈











