在21世纪,我们不仅已经建立了预测天气系统演变的模型,甚至开发出了下个世纪的气候模型,但所有这些模型都受到我们对周围世界的观测的制约和影响。成熟的天气、空气质量和气候预测需要将模型与观测相结合,因此,需要对模型和观测进行全面、自洽、多层次的融合,以确定许多层次的不确定性。4月6日发表于 Science Advances 的一篇综述回顾了目前融合模型和观测的方法,以及最佳实践,还阐述了如何更好地利用这些方法来改善预测。观测不仅用于初始化预测,而且还可以用来改进模型;反过来,模型也可以用来为预测提供更完整的地球系统的数字“孪生”。以下是这篇文章的翻译。
研究领域:地球系统科学,地球系统预测,数据同化,数字孪生
Andrew Gettelman,Alan J. Geer,Richard M. Forbes等 | 作者
刘志航 | 译者
邓一雪 | 编辑
论文题目:
The future of Earth system prediction: Advances in model-data fusion
https://www.science.org/doi/10.1126/sciadv.abn3488
摘要:地球系统的预测,例如天气预报和气候预测,需要通过多个层次的观测来建立模型。一些整合模型和观测的方法非常系统和全面(如数据同化,Data Assimilation),还有一些是单一用途和定制的(例如,用于模型验证)。我们回顾了目前用于整合模型和观测的方法和最佳实践。我们强调未来的发展如何使先进的异构观测网络和模型,从而能够改进从天气到气候的各个尺度的地球系统(包括大气、地表、海洋、冰冻圈和化学)预测。随着社会各界推动下一代模型和数据系统的发展,有必要对模型、观测和它们的不确定性采取更全面、综合和协调的方法,以最大限度地提高地球系统预测的效益和对社会的影响。
“做出预测很难,尤其是对未来的预测。”这句话不约而同地被尼尔斯·玻尔(Niels Bohr,科学家)、尤吉·贝拉(Yogi Berra,体育明星)和马克·吐温(作家和幽默大师)说过。预测是研究地球系统的主要目标之一,其跨度和范围从几分钟到几个世纪,从几公里到整个地球。对未来地球系统进行准确预测的社会价值是巨大的,至少从亚里士多德的论文《气象学》(Μετεωρολογικά)开始,几千年来一直推动着人类观察和了解我们的世界。
在21世纪,预测工作已经取得了巨大的进展。在观测和理论的基础上,我们已经建立了预测天气系统演变的模型,可以提前数小时至数天警告当地的极端事件,全球天气预测模型、下一个季节的气候异常模型以及下个世纪的气候模型都被开发出来。但预测(prediction)和推测(projection)之间是有区别的,预测依赖于不确定的未来边界条件,如大气中温室气体的水平。所有这些模型都受到我们对周围世界的观察的制约和影响。这篇综述回顾了目前融合模型和观测的方法,以及最佳实践。我们还展示了如何更好地利用这些方法来改善预测。
成熟的天气、空气质量和气候预测需要将模型与观测相结合。观测被用来确保预测的起点与地球系统的当前“状态”相一致,同时也被用来构建和评估模型。天气预报的初始化已经达到了非常高的复杂程度,利用数据同化(Data Assimilation,DA)的过程,需要每天在全球范围内获取数以百万计的观测数据。相比之下,模型的开发和验证仍然依赖于个别事件或小数据集的观测方法。对详细过程建模的不足会导致我们的预测出现持续的错误。因此,一个更好的将观测和模型融合为一个整体的范式,将会针对模型错误的来源,推进模型过程的表述,并通过提高我们管理不断增长的不同数据流的能力,大大推进预测能力。
同样关键的是要了解系统在任何时候的可预测性。可预测性描述了预测的不确定性,是空间和时间尺度上的函数。集合预报的兴起(使用多种实现方法)已将可预测性转变为一个可能性(或概率)的包络,而不是一个确定的量或单一的预测。这符合明确定义预测不确定性的社会需求。社会在设计基础设施时,无论是考虑最大的雪量、最小的水流,还是最小或最大的供暖/供冷,都要考虑容忍度和极端情况。为了优化这种预测系统,需要对模型和观测进行全面、自洽、多层次的融合,以确定许多层次的不确定性。
对地球系统预测和预报的想法和预期正在提高,例如,地球的数字孪生体的设想[1]。这需要模型和观测的融合,可以称之为模型-数据融合。关键问题是模型是否已经准备好了?模型是否能足够准确地表达复杂的过程(如深层对流云)?观测是否提供了足够的信息来约束和改进这些模型?在这篇综述中,我们探讨了利用观测数据为模型开发提供信息和指导的方法,而不仅仅是为了更好地初始化预测。
首先,我们回顾了当前的模型和观测,以及它们随着时间推移所取得的进展(第二节)。然后,我们回顾了用于融合模型和数据的工具(第三节),以及对当前最佳实践的回顾。最后,在“观测和模型融合的方法”一节中,我们提出了一条最大限度地利用即将增加的计算能力进行建模和分析以及加强对地球系统观测的路径。最后,我们在“模型-数据融合的未来”部分对此进行了总结。
首先,建模受限于计算能力的进步。测量受到技术(例如,特定传感器设计的分辨率和覆盖范围)和物理约束(例如,由于气体、水媒和气溶胶在不同波长下的光学特性不同,遥感辐射中的可用信息量)的限制。两者需要实现成本和的社会效益的均衡。模型和观测都在快速发展。在这里,我们回顾了地球系统模型和观测的发展轨迹,以更好地展现将模型和观测(包括当前和未来的系统)融合起来的前景。
-
地球系统模型
从数值天气预测的概念首次被提出,已经有近100年时间[2]。自从20世纪40年代末第一次用电子计算机进行数值实验以来,天气[3]和气候[4]模型已经有了明显的进步,知识和计算能力都有所提高。虽然“摩尔定律”规定的计算能力每18个月翻一番的黄金时代可能已经结束[5],但新的计算机架构和软件继续使计算能力取得进展[6]。
如图1所展示的,是模型以特定的预测尺度为目标,将复杂性和计算资源集中在特定空间和时间尺度的关键过程。例如,网格间距为1-4公里的区域中尺度模拟,可以在48小时或更短的时间内进行的风暴预测,而在更宽的(100公里)空间网格上的全球模型则要运行几十年来预测气候变化。这两种模型经常改编或衍生自更详细的大涡模拟模型(尺度为10至100米)的方法。预测的未来重点不仅需要延伸到系统的状态(如温度、风速、雨量和径流量),而且还需要延伸到直接影响人类社会的应用(如水文和空气质量)[7]。预测的时间尺度也在不断扩大,例如,农业的次季节性到季节性的预测,以及对海平面上升进行十年和百年的预测。
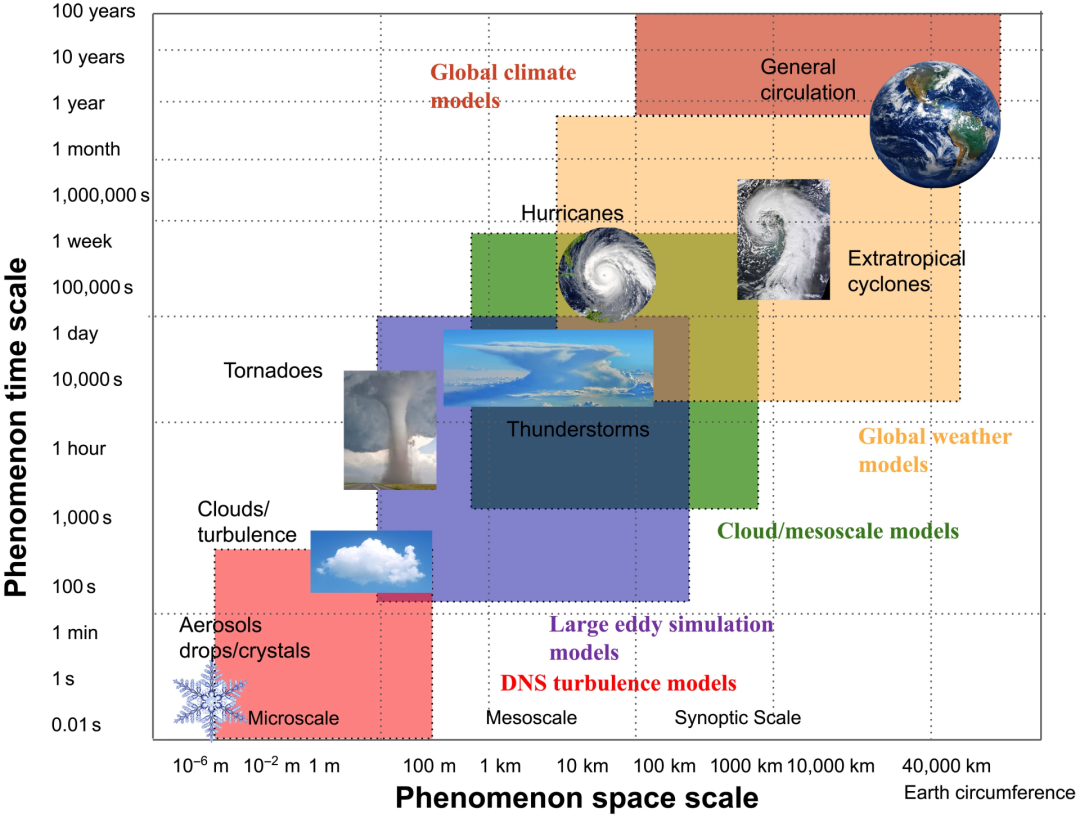
图1. 大气现象的空间和时间尺度示意图,从“微尺度”的气溶胶和云滴/晶体,到“中尺度”的云、龙卷风和雷暴,再到“天气尺度”的热带气旋(飓风)和温带气旋,直至大气环流和全球气候尺度。
天气、气候和空气质量模型可能会演变为具有使它们与当前模型区分开来的几个特征。它们将具有更高的分辨率,全球天气模型的预测尺度可达到1公里[8],全球气候模型尺度将达到5至10公里[9]。模型将不仅包括地球系统的其他全部组成部分,特别是陆地和化学,还包括海洋和冰冻圈。从天气到气候综合模型系统将被设计成使用共同的元素进行跨空间和时间尺度的预测[10]。目前的一些努力包括英国气象局的统一模型[11],以及欧盟的“目的地地球”计划[1]。综合地球系统模型将能够定位特定的位置,通过可变分辨率的网格,以高于全球模型的分辨率放大到感兴趣的地区[12],并可以取代具有边界条件的区域气候模型。这种系统可能旨在提供与社会相关的应用,如水文或空气质量[13]。模型也将有更复杂和多样的过程表现,在不同的空间尺度上无缝运作。模型还将具有更复杂、更多样化的过程表示,它们可以在空间尺度上无缝运行。此外,对模型的改进将更难评估,因为一个地球系统组件的变化将影响所有其他组成部分的属性预测。这些努力需要整个研究社区有意识的协调,否则就有可能被分割成专门的模型(和观测),从而减缓预测的进展。最后,建模和可预测性的进步不仅需要比现在更多的观测,而且需要不同类型的观测,特别是那些针对精细尺度过程和地球系统组件之间接口的观测。
-
地球系统观测
天气观测先于模型。使用温度计的定量观测可以追溯到1659年[14,15]。来自太空的地球观测始于1960年第一颗电视红外观测卫星(TIROS-1)的天气模型的可见图像[16]。全球观测范围从地面站和无线电探空仪的全球电信系统 (GTS) 网络到众多单独的卫星和“星座”。在过去的50年里,数据的可用性在几个方向上爆炸性增长,包括观测的数量和类型。来自主动和被动传感器的卫星观测测量云、气溶胶和环境属性[17],以及陆地、海洋和冰冻圈的表面属性。商业飞机测量风、温度、气溶胶和微量气体[18]。机器人地下探测器测量海洋温度、盐度和海流[19]。地面站点和塔台测量地表属性,包括湿度和积雪。遥感使用从覆盖海洋到外层空间的不同平台观测到不同波长的辐射(例如,可见光、红外线和微波)。然而,地球系统的许多关键部分仍然没有得到充分的采样。此外,目前大多数全球观测系统既没有观测到天气系统内部结构的快速时间演变,也没有观测到驱动这些系统的风。
有几项工作已经描绘了观测系统的未来[20]。对地球系统的观测将具有更高的空间和时间分辨率,并从多个角度/平台对更多波长的辐射进行更精确的扩展。紧密间隔的小型卫星群将有助于提高时间分辨率[21],能够自适应地观察(瞄准)感兴趣的特征。这可以通过加强这些目标区域的地表遥感技术来加以补充。被动测量(如来自可见光和红外线传感器)和主动测量(如微波雷达和激光雷达)之间的协同作用,在目前采样不足的(偏远)地区将特别有价值。使用较小的传感器如立方体卫星[21]的空间部署成本降低,将使观测无处不在。传感器甚至可以利用智能手机技术[22,23]。传统上,只有高价值的传感器(如飞机风速和温度传感器)对天气预报具有很重要的作用[24,25]。然而,许多其他异构网络也可能获得对天气、空气质量和气候预测有用的数据,包括家庭供暖和制冷系统、空气质量传感器、智能手机和汽车[26],甚至人类流动等社会数据。这些异构的观测数据在质量和校准方面各不相同。这既是一个巨大的机会,也是一个巨大的挑战,需要重新思考如何将各种不同的、可能具有高度不确定性的观测数据相互结合起来,并与模型相结合。
模型和观测并不是相互独立的。几乎所有的观测都有一个模型;同样,模型是用从观测中得到的物理规律发展起来的,并根据观测进行评估和约束。考虑一个例子,即使是传统的酒精或水银温度计也不能直接测量温度。它测量的是体积的变化,然后温度计使用一个观测模型(温度计外部的刻度)来将液体的体积转换为温度。热电偶(电子温度计)在一个有两种金属的电路中测量与温度有关的电压变化。因此温度相关函数就是一个观测模型。卫星也不直接测量温度,它们很可能测量电荷耦合器件(CCD)上的电压。这个电压与从地球到传感器的特定波长范围内的辐射强度(即辐射度)成正比。这种辐射是由从地球大气层中的气体或粒子或从地球表面发射的光子组成。放出的光子数量取决于(除其他外)当地的温度。在到达传感器之前,光子可能已经通过其他大气颗粒和气体的散射,或者甚至通过表层内的散射(例如在雪堆中)多次改变了它们的行进方向。为了从观测中提取地球物理信息,如大气层的温度,一个复杂的观测模型总结了所涉及的复杂物理过程,从地球上某个地方的光子发射到它们在传感器中转换为电压。鉴于所涉及过程的复杂性,观测模型很可能需要有关环境的信息,这些信息不是来自传感器本身,而是来自另一个测量或模型。例如,除了预期测量体积中的局部温度外,测量可能对云层、表面反照率或地球表面温度敏感。
-
模型-观测系统的组成部分
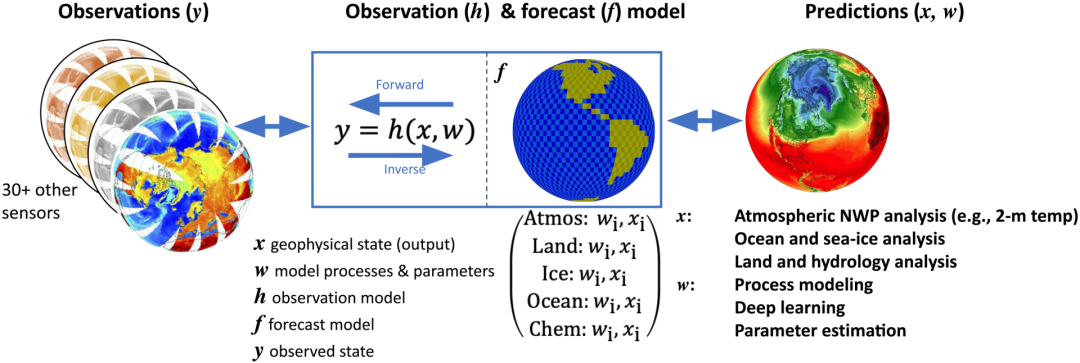
图2说明了在通常所说的同化系统(assimilation system)中,将预测模式和观测结果联系在一起的关键部分。观测模型(h)使用一组给定的参数(wi)将感兴趣的物理量(xi)与内部仪器的物理测量(yi)联系起来。在遥感仪器的情况下,物理测量值是辐射强度,但测量值也可以是辐射的消减(例如,当辐射被云层遮挡时发生的减少)、光子计数,甚至是体积的变化(如液体温度计)。同化系统是一种反演观测模型的方法,以调整预报模型(f)的物理状态(xi),使之更接近观测值(y)。预测模型使用状态(x)和一组参数(wi,有些可能与观测模型共享)与一组物理方程来产生预测。这些预测可以是地球系统中任何需要的数量(xi),包括我们通常所说的“天气预报”:预测大气的状态,如风和温度,其中x={u,v,T} 在未来的某个点(这里,u和v代表水平风分量,T代表温度)。预报模型本身可以以不同的方式使用。在一个同化系统中,模型运行了很短的时间,观测模型与观测结果直接比较,使初始状态更接近观察状态。在一个较长期的预测模型中,对于季节或气候的时间尺度、初始状态的影响逐渐消失,预测模型参数(wi)是关键[27]。请注意,缓慢演变的地球系统组成部分,如部分陆地(植被)、冰冻圈(冰川和冰盖)和海洋(温跃层和深海)的初始条件在季节性甚至年际范围内仍然很重要,因此气候的“短期”预测可以被定义为一个季节到一年甚至十年。
图2. 观测结果和预测模型。与同化系统中的观测(左)和应用或输出(右)相关的观测和预测模型示意图。在某些系统(四维变分)中,预测模型和观测模型是紧密耦合的,并且在时间上向前和向后运行。在其他系统中,它们的耦合更松散。目标是预测地球物理状态(针对多个变量 xi)。该系统还可用于改进预测模型本身的参数(wi)。
-
反演
观测模型的反演是根据观测值y推断地球物理状态x的关键过程,无论是在数据同化系统中还是在通常称为反演(retrieval)的过程中[28]。反演是一个过程,通常从一个或几个来源摄取观测数据,并在一个地点或一小部分地点(如大气层中的一部分)产生一个地球物理变量(如温度)。这些反演结果往往被视为“观测”本身。进行反演需要了解真正的观测模型(或至少是一个经验版本)。反演地球物理变量(xi)变得很困难,原因有二。第一,观测模型的物理复杂性和观测模型对许多不完全已知的地球物理变量的依赖性,使得这些变量可能需要作为“先验”数据(x的未观测部分)提供给反演使用。现场测量的观测模型可能还需要了解环境温度,因为它可能影响测量过程。许多用于空间测量的观测模型需要知道地球表面的属性。对于遥感观测,观测数据(y)和外部提供的先验数据(这可以用图2中的w表示)进入一个复杂的辐射传输模型(h),以确定与输入一致的特定状态(x)。反演通常包括其他类型的隐式模型,如温度和云层的大气结构,或太阳辐射光谱。值得注意的是,我们刚刚用同样的术语描述了“观测”(yi)的产生,这些术语同样被用来描述进行模型未来的预测(未来的xi)。
由于代表了许多自由度的观测模型的不同输入,观测很少(如果有的话)能提供足够的信息,以产生一个关于地球系统在特定地点和时间以及特定兴趣变量的确定答案。用数学术语来说,这个问题是不适定的,或者说,没有观测模型的直接逆。需要辅助的(先验的)数据来减少自由度的数量。不幸的是,反演的不确定性和自由度因情况而异,混淆了描述反演中不确定性的能力。先验数据的不确定性的影响可以被考虑,但只有在对反演的使用方式进行仔细的分析后才能被考虑[29,30]。因此,当使用不太复杂的(或没有)误差表示时,不同情况下的可变信息和自由度是造成“反演误差”或不确定性的最大因素之一。一个例子是在基于降水雷达的反演中对小雨缺乏敏感性[31]。
随着对物理和光学特性有更好的了解,反演工作正在取得进展。他们还在以独特的方式在获取更多“先验”数据方面取得进步。新的经验方法被用于估计w,如神经网络将观察到的量(y)与在实验室测量的地球物理状态(x)联系起来,或通过其他数据获得,开始应用于反演问题[32]。神经网络的优点是“神经元”权重的线性组合,可以很容易地反向传播,以产生来自模型状态的合成观测的前向模型,正如用观测模拟器进行的那样(见下文)。许多这样的机器学习方法提供了单个输入对输出响应的驱动强度等级,这可以用来帮助理解不确定性和观测模型精度要求。
上述异构观测系统的未来,需要对反演进行不同的思考。一个更加异构的观测系统可能不仅包括卫星和常规网络(飞机、地面温度和无线电探空仪),还包括利用现场和活动数据进行同化,以改善过程的代表性,以及在特定的制度下。这可能需要为复杂和特殊用途的仪器建立新一代的观测模型。新的测量来源还可能包括小型卫星群,它们的特性较差(单一传感器),精度有限,和/或精度未知,但频率增加。在这里,观测的不确定性凸显出来,必须以创新的方式加以处理。在这种系统中可能存在交叉校准传感器以减少自由度的新机会。最佳估计技术(在许多方面与反和数据同化相同)可以根据各种标准对不同的测量进行加权,以产生地球物理变量的最佳估计[33]。
-
数据同化
图2说明了数据同化如何像一个试图包括所有可用观测数据的反演过程,观测模型与一个复杂的地球物理预测模型(f)一起运行。这可以前向和(隐式的)向后运行,以优化地球物理状态,最好地代表观测结果。虽然模型被设计成完全内部自洽的(动力学、热力学和辐射都在一起工作),但由于模型的错误和/或初始状态的错误,或其他关键的模型输入,如空气质量应用中的排放,还是会偏离现实。模型偏离观测状态的“漂移”,以及个别参数化对这种“漂移”的贡献,允许识别需要注意的参数化,并可用于改进气候模型[34]。数据同化的目的是使模型保持“正轨”,即通过使初始条件(x)更真实或通过修改模型参数(w)。要做到这一点,对观测和模型的不确定性的了解是至关重要的,可以从统计学上决定每个应该“信任”多少,从而将模型推向可观测的程度。
近几十年来,数据处理技术的改进是数值天气预报明显改进的主要原因,即使从相同的观测中也能提取更多的信息。例如,作为再分析工作的一部分,当前系统对1980年代的预测远远超过了当时的业务系统[35]。数值天气预报的关键里程碑[36]包括20世纪90年代开发和采用三维和四维变分同化的大气,最近开发的集合变分数据同化方法和一些变分-集合混合方法。所有主要的全球中心都使用这些方法的变体来进行数值天气预报和再分析。改善预测的进一步发展也包括更直接地使用卫星辐射率,而不是反演产品和卫星数据,后者会受到云和降水的影响。
对于其他地球系统组成部分(如陆地和海洋)的初始化,使用了各种各样的技术,如最优插值法、简化的集合卡尔曼滤波器和上述的异构方法。通常情况下,用于这些组成部分的操作方法没有用于大气层的方法复杂,至于是否基于不同的要求或数据可用性来证明这种多样性是合理的,或者不同组成部分和社区的方法趋同是否有益,这是一个开放的问题。当然,对于更广泛的预测(如次季节性到季节性;初始化的十年),预测性的改进必须有很大一部分来自地球系统中变化较慢的部分(陆地、冰和海洋),从而促使人们进一步关注这些部分的同化方法[37]。这些努力正在使数值天气预测演变为[3]所谓的天气-气候数值预测(Numerical Environmental and Weather Prediction,数值环境和天气预报)。
关于如何最好地同时初始化地球系统各组成部分,还有一些重要问题。到目前为止,通常的做法是在每个组成部分单独进行数据同化,但各种研究工作正在研究不同程度的耦合同化。这些研究从非常弱的耦合同化(同化基本上还是在不同的组成部分中分别进行,但使用的是耦合的模型背景)到强耦合同化(一个组成部分的观测结果直接影响另一个组成部分的状态)[38]。有许多开放的途径和研究问题,但有希望通过对多个部分进行更一致的初始化(如避免冲击和确保平衡耦合),并允许更好地利用对表面状态(如海面温度、海冰、雪或土壤水分)以及大气状态敏感的卫星数据,以获得更大的收益。事实上,忽视地球系统中的物理耦合可以被认为是观测中的另一个错误来源。因此,同化系统中反演所需的先验数据就可以(如海面温度)来自同化本身的一部分。
通过使用观测和同化技术从结构上改进模型,有相当多的机会可以改进预测工作。传统上,数据同化系统只修改模型的状态(x)。然而,最近的研究表明,观测也可以用来修改模型的“参数”(w)[39,40]。在这个范式中,允许近似或不确定的模型参数随用于获取其值的观测值而变化。在最近的例子中,允许不确定的模型组件随时间而变化,并且使用观测来估计它们的演变[41]。正在出现的工作是通过机器学习,利用观测来发展模型结构[42,43]。对于空气污染预测等应用,还有一种使用数据同化的方法,即通过改变模型输入以更好地匹配观测数据来约束火灾、沙尘和人为的排放[44]。通过对过去的观测数据进行短期预测的训练,这种方法也可用于改善气候模型[45,46]。
另一个关键的进展是同化系统中使用的观测类型。传统上,这些观测与大气状态的连续场有关,如温度、水汽、风或化学成分,如臭氧。只是最近才开始同化与关键但不连续的领域有关的观测,如云或气溶胶[47,49]。云对天气和气候预测都很关键,没有云的同化,会对初始化后不久的条件发展产生重大影响,从而大大改变预测的结果。与云相关的观测资料的同化已经滞后,因为(i)许多数据同化方法很难处理不连续场,(ii)可观测的云量(例如反射率)与物理模拟的云特性(数量和质量)没有直接关系,以及( iii)与模型云表示中的结构误差很大。推进(i)和 (ii)对于预测和减少云过程表示(iii)中的结构误差至关重要,这些误差是跨尺度天气和气候预测的重要不确定性来源。
我们已经描述了数据同化系统如何利用现场观测(如地面站的温度)以及远程观测的卫星或地面辐射量来优化调整模型状态以适应观测结果,并利用复杂的观测模型将两者联系起来。地球系统(大气层、陆地、海洋和冰冻圈)的当前或“初始”状态是大多数预测的主要不确定性,其时间尺度小于“去关联时间”(decorrelation time),大约是系统失去对其先前状态记忆的时间。这个时间尺度对于对流来说可能是1天,对于天气系统来说是10天,对于土壤湿度来说是1个月,对于像厄尔尼诺或海冰变化来说是1到2年。在较长的准备时间内,模型表示过程的不确定性对误差的影响可能和初始条件一样大[50,51]。这对于时间尺度较短的云和降水过程尤其如此。
天气和气候的数值模型,除了图 2 所示的同化系统的初始条件约束外,还受到观测的严重约束。许多模型过程在模型网格尺度上不能由物理定律唯一地描述,而是通过观测量和预测状态变量之间的经验关系(“参数化”)来约束观测。这可以是简单的,如建立在地表测量点或飞机活动的数据集上的回归[52],也可以是复杂的,如用训练数据建立的神经网络,例如长波辐射模型[53]。在缺乏足够的观测资料的情况下,较粗的分辨率模型在开发参数化时常常依赖较细的分辨率模型[54],尽管较细的分辨率模型可能存在偏差或尺度不匹配。因此,在没有观测资料的情况下,存在着一个潜在的跨模型的级联误差。模型试图通过热力学的基本定律(质量和能量守恒)来约束过程和整个状态,从而打断这种级联,但这样就容易出现补偿错误。观测数据也被用来评估模型在预测地球系统过程中的表现,特别是对在模型构建中使用的数据不一定考虑到的区域和过程。然而,对地球系统关键组成部分(例如雷暴)的时间演变观测是有限的。因此,参数化的错误往往很难识别。
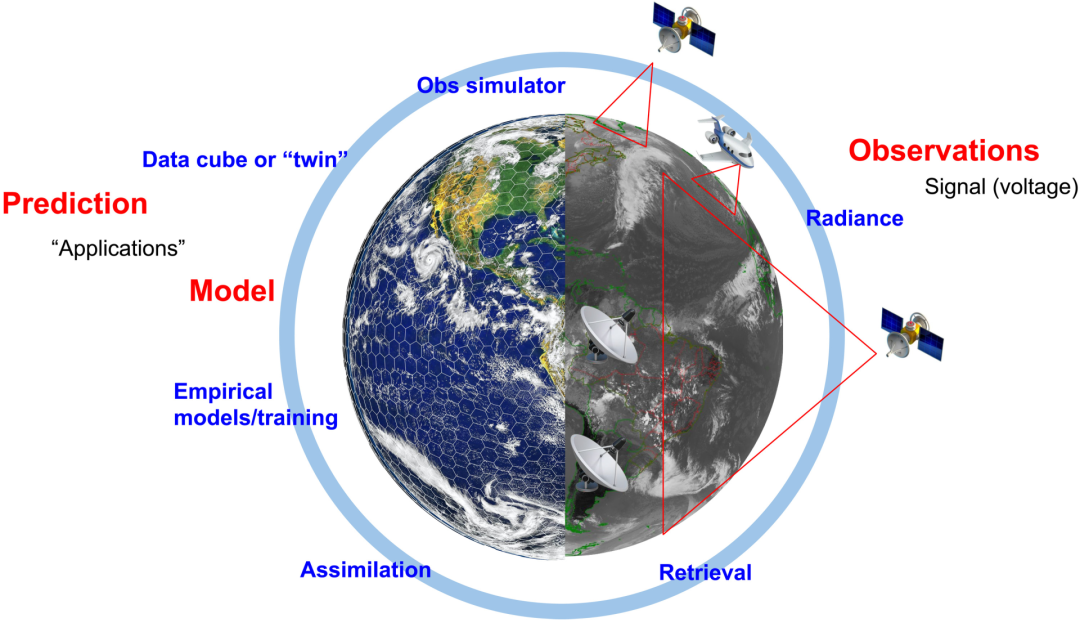
由于模型和测量的一体化,越来越难以确定模型的停止和观测的开始(反之亦然)。图3将图2中的模型和数据系统重新置于一个整体的背景中。在同化系统中,通过修改下一次预报模拟的初始条件,观测数据被用来为预报提供信息。观测数据也可用于训练模型,通过最小化模型和全球系统中的一组观测数据之间的差异。对于天气预测模型,过去事件的预测误差被用来验证模型的预测。对于气候预测(或推测)模型,观测结果也可用于评估进入全球系统的较小规模过程模型的层次结构。另外,该系统可以被倒置,模型可以用来设计观测,以最大限度地减少预测的不确定性。与其问“对于一组给定的观测,预测的不确定性是什么?”,倒不如反过来问“对于所需的预测不确定性,需要什么样的观测?” 我们已经以这种方式进行了一些有针对性的观测,例如,对热带气旋进行有针对性的下投式探空仪观测,以减少登陆风暴的预报误差。关于目标观测的进一步讨论,见“利用模型修改观测系统”一节。
图3. 模型-数据融合。模型和观测的融合示意图,观测系统只能看到地球的一部分(在空间、时间和光谱区域,由图中的黑白色部分指出)。卫星辐射值(来自信号)的观测结果被合并到反演或同化系统中。同化系统可用于训练模型,而观测数据可用于建立经验模型,作为传统地球系统模型的一部分。这样的模型产生的预测结果可用于实际应用。该模型可以被认为是地球系统的“数据立方体”(data cube)或数字“孪生”,填补了观测没有覆盖的空间、时间和光谱区域。这些输出可用于观测模拟器,以获得合成辐射度,用于评估模型或规划观测系统。最终目标是将信号转化为对特定应用的预测。
在这个模型-数据融合的愿景中,模型是用于开发、初始化和评估模型的所有数据的自洽表示。然而,模型提供了一个更完整的系统属性和过程的多维(三维+时间)视图,这在观测中是缺乏的。从另一个角度看,模型可以被认为是一个动态的插值器,它利用地球系统中转换过程的物理知识,填补了观测结果之间的空白,这些观察结果只限于选定的变量,而且在空间和时间上往往很稀疏。例如,在辐射度方面,如果观测提供了一个波长的黑白视图(如图3所示),模型可以提供许多额外的波长(如图3中的颜色所示)和与该图片一致的变量。
-
模型评估和开发
现在的模型开发和评价经常使用包括与数据同化不一样的不确定性估计的数据方法,如参数 wi [55]的贝叶斯评估或受数据约束的模型仿真器[56,57]来优化模型参数。最近,随着神经网络[58-60]或贝叶斯优化[61]的应用,经验参数化方法(将过程速率与数据拟合)有了飞跃性的进展。这些基本上是高阶经验模型,受(i)观察结果或(ii)详细、明确的模型解决方案的约束,可以重现观测结果。机器学习方法可能存在典型的过拟合和外推的经验模型问题[60],不一定能定义因果关系,但最近的研究正试图建立物理规律和约束[62]。
同化系统也可以用来帮助综合理解模型的故障。同化系统应用于模型的“分析增量”,使其向观测值靠拢,其结构显示了模型在不同地点和不同状况下的偏差。这可以成为改进模型的有力工具[63, 64]。
这些努力使模型和观测之间的联系更加明确。同化系统也为连接模型和观测提供了严格和客观的框架,并明确应用工具来评估不确定性。同化可以将初始条件和模型的不确定性与观测联系起来。用于同化的初始条件和模型结构都取决于数据,因此也取决于观测和反演的不确定性。这突出了理解和量化观测不确定性的极端重要性。未来的预报将在目前集合预报的基础上,将对概率和不确定性采取更全面的方法。概率预报应该反映模型和观测中的不确定性,这些不确定性在空间、时间或天气状况上都是不稳定的。
-
数据立方体和数字孪生
模型-数据融合的目标是一个灵活的系统,在这个系统中可以提出许多问题,要么是关于过去和系统如何运作的问题(分析),要么是关于未来的问题(预测)。对地球系统在过去某个时间点的状态进行完整的“分析”,并能以许多不同的方式探究这个过去,这是一个“数据立方体”(data cube)[65],它在空间和时间上把不同的观测和模型数据库联系起来,代表了地球系统的物理约束。从建模的角度来看,模型可以被认为是一个“数字孪生”(digital twin),这是一个工程术语,其中创建了设计的计算机模拟,也可以进行测试、评估和探测,以便可以预测行为(例如,可以在流体动力学模型中“飞行”,以检查性能、应力等)。数字孪生可以在构建任何实物之前改变设计,也可以成为地球科学应用的模型[1]。模型-数据融合使以下目标成为可能:在任何时候对系统的状态进行分析并对系统的未来进行预测。模型-数据融合系统同时使用模拟和观测,并随着时间的推移改进系统,在两者之间向前和向后工作,同时数据立方体被用来建立、评估和发展数字孪生体。
-
观测模拟器
数据立方体或数字孪生的目标之一是使用模型直接模拟观测,以便能够更好地评估模型,甚至确定观测的不确定性。这可以用观测模拟器来完成,它使用前向观测模型来获取模型状态(图2中的xi),并产生一个合成观测(yi),这样就可以用最小的反演不确定性来评估模型与观测。例如,如果模型场景都是冰,或者都是液体,那么观测结果会是什么样子?同样的方法也可以用在模型中。已经大量使用的例子是包括偏振和速度的雷达模拟器[66-68]以及包括红外和无源微波的卫星模拟器[69,71]。这些模拟器支持针对特定过程的模型评估,特别是微观物理过程,在观测中产生“指纹”[72],可用于更好地理解和约束过程和属性[73,55]。
-
利用模型修改观测系统
一个进一步的进展是,不仅要利用观测来改进模型,还要利用模型来改进观测和观测系统。虽然数据同化的发展可以从观测中提取更多的价值,但现代同化系统也可以为观测系统的优化设计提供参考。这种方法可以揭示出特定类型中的最重要观测,包括优化测量的位置和时间,以减少预测误差。已经有一些框架可以了解特定测量的价值和重要性,如观测系统模拟实验(OSSE)[74,75]和用于测量分析不确定性随观测系统变化而变化的集合数据同化(EDA)框架[76]。这些评估不必是静态的,而是可以灵活地对特定情况作出反应,特别是在有高度社会影响的时候。也许人们注意到的最常见的例子是在天气预报中使用有针对性的观测,例如,“飓风猎手”飞机进行测量以改进对热带气旋的预报,或针对热带气旋定向下投探空仪[77]。迄今为止,有针对性的观测的影响是有限的[78],但确定观测系统以使社会影响最大化这一更广泛的概念仍然很重要。模型可以“反向”使用,系统地(从统计学角度)探索拟议的观测或观测系统将如何影响预测及其不确定性。虽然在解释时需要注意,因为观测需求不能完全与数据同化和建模系统的质量脱钩,但通过使用模型来改进用于预测的观测,诸如OSSE和EDA等方法就可以完成图3中的循环。
-
不确定性
贯穿上述要素讨论的是对不确定性的多层次处理,在本综述中已经提到26次。为了用于反演,必须对观测的不确定性进行定义,每个观测方法、传感器和情况都有特定的误差(观测误差取决于物理情况)。因此,对空间和时间上的观测误差相关性的了解也很重要。反演具有来自先验数据和不确定性物理学或辐射传输计算的不确定性。模型的制定和参数都有不确定性。为了使同化技术发挥作用,它们需要对模型和观测进行良好的不确定性量化,以确定对某一观测调整多少(以及在何处和何时进行调整)。
集合预报认识到这种不确定性,并试图捕捉它,目的是量化特定情况下的可预测性。目前是通过扰动初始条件、将随机扰动应用于参数化趋势[79]或随机修改模型参数[41]以反映不确定性来完成的。集合现在在初始条件[80]、多模式[81]和参数估计集合[56]的气候预测中也很常见。改进的模型-数据融合系统将使人们能够更好地理解和处理不确定性。
为了规划前进的道路,我们可能会问“是什么限制了我们的预测能力?”,是模型的质量还是不确定性/缺乏观测?在气候的时间尺度上,当大多数初始条件的影响逐渐消失时,预测的限制是由于模型公式中的错误。在短的(天气)时间尺度上,各种原因造成了不确定的预测。对于海洋来说,预测可能因缺乏对地下观测而受到限制。对于大气湍流和云层(以及其他子网格过程,见图1),在模型网格尺度上高度不确定的过程公式可能是最大的限制。此外(部分是由于尺度的原因),我们没有利用所有可用于同化或模型开发的观测资料。尽管最近取得了一些进展,但云层观测仍然是同化观测利用不足的一个典型例子。因此,模型和观测都需要进步,也需要通过观测模型和同化技术来实现它们之间的协同作用。因此,上面提出的问题是一个错误的二分法:在改进模型或观测之间不是一个二元选择。改进具体的天气和气候预测(如降水预测)需要在推进模型和推进观测之间进行平衡和相互依赖的努力。预测的局限性将因预测的数量和规模(空间和时间)而有所不同。
使用新的观测数据(例如云)的关键挑战之一是观测和模型之间的尺度不匹配。随着模型分辨率的提高,这对连续场(温度和风)来说就不是一个问题了,但对不连续场(如凝结水)的高度非线性同化问题没有帮助。即使对参数和过程的随机表示增加了分散性,天气预报系统也很难表示由这些非线性过程产生的观测变异性。随着模型分辨率和非线性的增加,可能需要重新思考数据同化方法。时间尺度是同化的另一个未被重视的方面。我们可以从连续站或地球同步卫星数据中推断变化,但空间(地面站)或光谱(地球同步)分辨率有限。两个相同的初始状态,不同的时间变化率将产生不同的未来,因此,观察和同化变化率,例如,用时间上紧密间隔和空间上同位的观测数据也很重要。
为了最大限度地改进预测,模型、观测和模型-数据融合都必须共同改进。如图3的综合示意图所示,模型-数据融合的未来包括几个相互交叉的研究领域:统一的模型、模型-观测的融合以及两者的不确定性特征。
-
统一模型
产生跨空间和时间尺度的有用预测,意味着有“统一的”或综合的建模系统,可用于天气、气候或空气质量的预测。空间和时间往往是联系在一起的(图1),较小的空间尺度信息往往是人们所需要的,以预测短时间内的极端事件(未来6小时,未来6天)。同样的极端事件信息在气候背景下也很有价值(极端天气事件在未来60年将如何变化)。一个为同化设计的系统可以用来理解和量化相对于观测的不确定性,为气候预测尺度提供信息。例如,云对气候变化的反应是气候预测的关键不确定因素之一。然而,云的过程发生在快速的时间尺度上,因此用数据同化系统约束云,然后也可以应用于气候,这是至关重要的[82]。来自气候尺度的约束,如全球网格和对能量和质量守恒的严格要求,可能对亚季节性到季节性预测很重要。每一组尺度所需的关键特征可以同时用于亚季至季节尺度的更好预测,因为在亚季至季节尺度上,初始状态和精确守恒都很重要。
现有的统一系统通常是多个模型或至少是嵌套的模型,通常作为“松散连接”的系统共享共同的组件。这些系统和模型必须是可扩展的(或可配置的),但如果系统以模块化的方式使用相同的组件,则可以简化。例如,一个系统在某些应用中可能不需要化学成分,应该具有灵活性,以便在不需要时可以去除化学成分或近似化学成分,以减少计算费用或解释的复杂性。
目前已经在尝试减少模型的计算成本,填补开发中的空白。这包括利用计算的进步和大规模计算的新架构,如图形处理单元(GPU)。它还包括利用机器学习来加速模型的某些部分,并为辅助模型启用新的线性化技术[83],这可能会加速反演算法的开发。
一个真正全面统一的模型-数据融合的努力需要巨大的努力和专业知识来建立,而且必须是一个社区的努力。是否有可能朝着更协调的方向发展整个系统或共同组件?鉴于每个模型-数据融合(预测)系统的“任务”各不相同,拥有一个适用于所有用途[84]的单一系统可能并不明智,也不实际。也许更好的做法是,以我们建立观测系统的方式来考虑建立预测系统:以模块化和可互操作的方式,分享想法和最佳实践。
模型将从更多的互操作性中受益,不是单一的算法或一套算法,而是用于建立模型并将其与其他地球系统组成部分联系起来的互操作性标准。这些标准应该包括观测和同化。目前,在不同的社区有一些这样的努力。例如,用于同化的面向对象的预测系统(OOPS),用于参数化的通用社区物理包(CCPP),国家统一业务预测能力(NUOPC),以及用于耦合组件的地球系统建模框架(ESMF)。
-
将观测结果集成到模型中
需要把观测作为预测系统的一部分来考虑。正如所讨论的那样,除了初始化模型外,观察结果在许多层面上被用于模型的开发和评价。这包括传统的过程模型开发,以及模型评估。现有的数据同化系统有可能与综合模拟系统一起被更全面地使用,以使天气尺度进入气候尺度(反之亦然)。反过来,模型可以告诉我们如何最好地优化观测,使预测的不确定性最小化。除了用于预报的目标观测外,还有一些技术(EDA 和 OSSE)有可能被更广泛地用于优化和设计观测系统。
从观测的角度来看,项目应该对卫星数据的可用性进行投资。理想的情况是,模拟器和前向操作人员的开发应该与反演开发同步进行,并应被视为生产卫星数据的一个组成部分,而不是为促进模型分析而事后考虑。一个很好的早期例子包括EarthCare卫星和数据同化框架的早期准备[48,49,85]。
在使用同化时,应同化更多类型的数据(如云和气溶胶观测数据)。目前,现有观测资料中只有一部分信息内容被同化——那些通常与半连续状态场的同化有关,如风、温度、水汽和化学成分。在同化包括云和气溶胶在内的不连续场方面应取得进展。例如,粒子数浓度对云和辐射过程至关重要。这些变量目前对普通的数据同化方法提出了很大的挑战,而且不容易观测到。相反,可以观察到云颗粒大小分布的高阶时刻(例如,雷达反射率与球形颗粒分布的六阶矩有关)。这些云的变量可以用来更好地约束模型。
分享观测数据是第一步。可以通过共享开发同化系统的框架和将模型和数据整合在一起的共同观测运营商来深化协调。社区已经在朝这个方向发展,但应加强这种努力,以扩展社区对观测资料的反演和不确定性分析的工具。这包括使用更广泛的辐射频率,包括雷达和激光雷达等有源传感器。
-
对模型和观测的不确定性进行详细描述
为了实现上述目标,需要更好地表征模型和观测。数据同化方法明确要求对观测误差进行估计。为了进行更好的预测,仅仅推进观测或模型是不够的;同时需要改进对观测和模型的不确定性的理解。集成模型-观测同化系统还可以产生性能指标和相对于观测的偏差指标,这些指标可以更好地描述模型的不确定性。
卫星系统需要来自校准和验证能力的更详细的不确定性估计。卫星数据在数据同化系统和模型评价中的大部分效用取决于良好的误差(不确定性)特征。
还应努力表征不确定性,并促进异构传感器(立方体卫星、小型卫星、集群和连接设备)反演的发展。这些异构的传感器网络将需要结合更少、更准确的测量,锚定更频繁但不太准确的数据和更广泛的覆盖范围。统计方法和机器学习/人工智能技术将变得非常有用,可以将这些具有可变不确定性的可变信息源连接起来,提供地球系统状态的最佳估计。
从建模的角度来看,模型评估应该使用数据同化方法来了解参数化和结构的不确定性和偏差。为了更好地将模型与观测结果进行比较,一种方法是使用卫星模拟器来评估观测空间中的模型。另一种方法是使用完整的数据同化系统,通过跟踪和最小化应用于模型的增量来改善模型参数(wi)的代表性。
未来的预测应该对概率和不确定性有一个更全面的方法。应该通过模型-数据系统的所有方面更好地描述不确定性,而且这种不确定性应该作为预测的一部分来说明。在贝叶斯方法的数据同化中,不确定性被明确地考虑了。综合系统应该使用不确定性特征来提供概率预测(带有概率的预测,例如,厄尔尼诺事件的概率或降水的概率)。未来的系统还需要将不确定性更好地传达给下游服务部门和公众。
-
技术进步
除了计算方面的定量进步以及计算的功率和成本降低(例如,通过加速器),模型-数据融合的进步可以通过不断发展的或新技术和方法来实现。利用新的传感器和网络技术,如立方体卫星或嵌入式传感器,可以对地球观测进行质的革命。新的观测可以与数据科学的进步相结合,如机器学习,以推进对数据中不确定性的解释和大数据集的因果发现。这种方法存在改进和自动化错误表征的潜力,这可能使得“数据驱动”的观察算子和预测模型用更好地受数据约束的模型取代当前的经验处理。
-
总结
地球系统的天气和气候模型正在迅速发展。新的和多样化的观测系统正在上线,增加了数据的多样性和数量。然而,为了提高预测能力,地球系统科学的这两个方面需要更好地融合。虽然这种“融合”自20世纪50年代以来一直在进行,早期的数据同化与数值天气预报[3]一起使用,但随着天气和气候的模型和观测系统的发展,现在有了一种独特的融合。观测不仅用于初始化预报,而且还可以用来改进模型。反过来,模型也可以用来为预测提供更完整的地球系统的数字“孪生”。我们对目前的各种方法和最佳实践进行了回顾,以说明它们如何共同发挥作用。对模型和观测系统的协调投资,可以围绕改进特定的重要预测(降水和极端事件)来进行,以确保社会效益最大化。模型和观测系统的开发应以特定地区的预测极限为指导(不同的预测结果可能不同)。
随着进一步协调发展,为了更好地利用地球系统科学的现有资源,我们将通过多种可扩展的方法来融合观测和模型,建立对改善预测至关重要的系统。这些系统将使用具有共享标准的定制方法,以及共同的观测系统,并开放数据访问。共享工具的社区开发工作可以扩大,既包括观测系统,也包括观测模型(包括正向和反向,即反演)和不确定性工具的开发。可以通过观测和模型组件的互操作性来促进协调。这些工具中有许多直接与观测-模型接口有关(正向运算器和模拟器)。开发用于反演和模拟的通用观测算子,可以更好地整合到观测计划中。这将使这里所设想的数据使用范围从传统的天气应用扩展到包括气候和空气质量在内的更完整的模型-数据融合。
这种更好地融合模型和观测数据的范式将提高预测能力。一部分改进将来自于对地球系统各组成部分更好的不确定性的量化。另一部分改进将来自于使用客观方法来改进模型和更好地观测初始条件。这种数据-模型融合系统也将提高我们理解复杂地球系统的能力,通过促进测试关于地球系统如何工作的假设,在几小时到几十年的范围内提供更好的社会相关预测。这是一个置信度很高而不确定性很低的预测。
-
P. Bauer, B. Stevens, W. Hazeleger, A digital twin of earth for the green transition. Nat. Clim. Chang.11, 80–83 (2021).
-
L. F. Richardson, Weather Prediction by Numerical Process (Cambridge Univ. Press, 1922).
-
S. G. Benjamin, J. M. Brown, G. Brunet, P. Lynch, K. Saito, T. W. Schlatter, 100 years of progress in forecasting and NWP applications. Meteorol. Monogr.59, 13.1–13.67 (2018).
-
D. A. Randall, C. M. Bitz, G. Danabasoglu, A. S. Denning, P. R. Gent, A. Gettelman, S. M. Griffies, P. Lynch, H. Morrison, R. Pincus, J. Thuburng, 100 years of earth system model development. Meteorol. Monogr. 59, 12.1–12.66 (2019).
-
M. M. Waldrop, The chips are down for Moore’s law. Nat. News 530, 144–147 (2016).
-
C. Edwards, Moore’s law: What comes next? Commun. ACM64, 12–14 (2021).
-
B. Beckage, L. J. Gross, K. Lacasse, E. Carr, S. S. Metcalf, J. M. Winter, P. D. Howe, N. Fefferman, T. Franck, A. Zia, A. Kinzig, F. M. Hoffman, Linking models of human behaviour and climate alters projected climate change. Nat. Clim. Chang.8, 79–84 (2018).
-
P. D. Dueben, N. Wedi, S. Saarinen, C. Zeman, Global simulations of the atmosphere at 1.45 km grid-spacing with the integrated forecasting system. J. Meteorol. Soc. Jpn.98, 551–572 (2020).
-
B. Stevens, M. Satoh, L. Auger, J. Biercamp, C. S. Bretherton, X. Chen, P. Düben, F. Judt, M. Khairoutdinov, D. Klocke, C. Kodama, L. Kornblueh, S.-J. Lin, P. Neumann, W. M. Putman, N. Röber, R. Shibuya, B. Vanniere, P. L. Vidale, N. Wedi, L. Zhou, DYAMOND: The dynamics of the atmospheric general circulation modeled on non-hydrostatic domains. Prog. Earth Planet. Sci.6, 61 (2019).
-
G. Brunet, S. Jones, P. M. Ruti, Seamless Prediction of the Earth System: From Minutes to Months (World Meteorological Organization, 2015).
-
M. J. P. Cullen, The unified forecast/climate model. Meteorol. Mag.122, 81–94 (1993).
-
X. Huang, A. M. Rhoades, P. A. Ullrich, C. M. Zarzycki, An evaluation of the variable-resolution CESM for modeling California’s climate. J. Adv. Model. Earth Syst.8, 345–369 (2016).
-
J. Thépaut, D. Dee, R. Engelen, B. Pinty, The Copernicus programme and its climate change service, in IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium (IEEE, 2018), pp. 1591–1593.
-
G. Manley, The mean temperature of Central England, 1698–1952. Q. J. R. Meteorol. Soc.79, 242–261 (1953).
-
D. E. Parker, T. P. Legg, C. K. Folland, A new daily central england temperature series, 1772–1991. Int. J. Climatol.12, 317–342 (1992).
-
A. J. Tatem, S. J. Goetz, S. I. Hay, Fifty years of Earth-observation satellites. Am. Sci.96, 390–398 (2008).
-
K. Bessho, K. Date, M. Hayashi, A. Ikeda, T. Imai, H. Inoue, Y. Kumagai, T. Miyakawa, H. Murata, T. Ohno, A. Okuyama, R. Oyama, Y. Sasaki, Y. Shimazu, K. Shimoji, Y. Sumida, M. Suzuki, H. Taniguchi, H. Tsuchiyama, D. Uesawa, H. Yokota, R. Yoshida, An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn.94, 151–183 (2016).
-
A. Zahn, E. Christner, P. F. J. van Velthoven, A. Rauthe-Schöch, C. A. Brenninkmeijer, Processes controlling water vapor in the upper troposphere/lowermost stratosphere: An analysis of 8 years of monthly measurements by the IAGOS-CARIBIC Observatory. J. Geophys. Res. Atmos.119, 11,505–11,525 (2014).
-
D. Roemmich, G. C. Johnson, S. C. Riser, R. E. Davis, J. Gilson, W. Brechner Owens, S. L. Garzoli, C. Schmid, M. Ignaszewski, The Argo program: Observing the global ocean with profiling floats. Oceanography22, 34–43 (2009).
-
National Academies of Sciences, Engineering, and Medicine, Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space (The National Academies Press, 2018).
-
G. Stephens, A. Freeman, E. Richard, P. Pilewskie, P. Larkin, C. Chew, S. Tanelli, S. Brown, D. Posselt, E. Peral, The emerging technological revolution in Earth observations. Bull. Amer. Meteor. Soc.101, E274–E285 (2020).
-
A. Overeem, H. Leijnse, R. Uijlenhoet, Country-wide rainfall maps from cellular communication networks. Proc. Natl. Acad. Sci. U.S.A.110, 2741–2745 (2013).
-
T. Cao, J. E. Thompson, Remote sensing of atmospheric optical depth using a smartphone sun photometer. PLOS ONE9, e84119 (2014).
-
R. A. Petersen, On the impact and benefits of AMDAR observations in operational forecasting—Part I: A review of the impact of automated aircraft wind and temperature reports. Bull. Am. Meteorol. Soc.97, 585–602 (2016).
-
E. P. James, S. G. Benjamin, B. D. Jamison, Commercial-aircraft-based observations for NWP: Global coverage, data impacts, and COVID-19. J. Appl. Meteorol. Climatol.59, 1809–1825 (2020).
-
M. Bartos, H. Park, T. Zhou, B. Kerkez, R. Vasudevan, Windshield wipers on connected vehicles produce high-accuracy rainfall maps. Sci. Rep.9, 170 (2019).
-
E. Hawkins, R. Sutton, The potential to narrow uncertainty in regional climate predictions. Bull. Am. Meteorol. Soc.90, 1095–1108 (2009).
-
M. Maahn, D. D. Turner, U. Löhnert, D. J. Posselt, K. Ebell, G. G. Mace, J. M. Comstock, Optimal estimation retrievals and their uncertainties: What every atmospheric scientist should know. Bull. Am. Meteorol. Soc.101, E1512–E1523 (2020).
-
J. Joiner, A. M. da Silva, Efficient methods to assimilate remotely sensed data based on information content. Q. J. R. Meteorol. Soc.124, 1669–1694 (1998).
-
S. Migliorini, On the equivalence between radiance and retrieval assimilation. Mon. Weather Rev.140, 258–265 (2012).
-
A. Behrangi, M. Lebsock, S. Wong, B. Lambrigtsen, On the quantification of oceanic rainfall using spaceborne sensors. J. Geophys. Res. Atmos.117, 20105 (2012).
-
M. Min, J. Li, F. Wang, Z. Liu, W. P. Menzel, Retrieval of cloud top properties from advanced geostationary satellite imager measurements based on machine learning algorithms. Remote Sens. Environ.239, 111616 (2020).
-
G. Feingold, R. Furrer, P. Pilewskie, L. A. Remer, Q. Min, H. Jonsson, Aerosol indirect effect studies at Southern Great Plains during the May 2003 Intensive Operations Period. J. Geophys. Res. Atmos.111, D05S14 (2006).
-
T. J. Phillips, G. L. Potter, D. L. Williamson, R. T. Cederwall, J. S. Boyle, M. Fiorino, J. J. Hnilo, J. G. Olson, S. Xie, J. J. Yio, Evaluating parameterizations in general circulation models: Climate simulation meets weather prediction. Bull. Am. Meteorol. Soc.85, 1903–1916 (2004).
-
H. Hersbach, B. Bell, P. Berrisford, S. Hirahara, A. Horányi, J. Muñoz-Sabater, J. Nicolas, C. Peubey, R. Radu, D. Schepers, A. Simmons, C. Soci, S. Abdalla, X. Abellan, G. Balsamo, P. Bechtold, G. Biavati, J. Bidlot, M. Bonavita, G. De Chiara, P. Dahlgren, D. Dee, M. Diamantakis, R. Dragani, J. Flemming, R. Forbes, M. Fuentes, A. Geer, L. Haimberger, S. Healy, R. J. Hogan, E. Hólm, M. Janisková, S. Keeley, P. Laloyaux, P. Lopez, C. Lupu, G. Radnoti, P. de Rosnay, I. Rozum, F. Vamborg, S. Villaume, J.-N. Thépaut, The ERA5 global reanalysis. Q. J. R. Meteorol. Soc.146, 1999–2049 (2020).
-
R. N. Bannister, A review of operational methods of variational and ensemble-variational data assimilation. Q. J. R. Meteorol. Soc.143, 607–633 (2017).
-
S. G. Penny, T. M. Hamill, Coupled data assimilation for integrated earth system analysis and prediction. Bull. Am. Meteorol. Soc.98, ES169–ES172 (2017).
-
P. Laloyaux, M. Balmaseda, D. Dee, K. Mogensen, P. Janssen, A coupled data assimilation system for climate reanalysis. Q. J. R. Meteorol. Soc.142, 65–78 (2016).
-
S. Kotsuki, Y. Sato, T. Miyoshi, Data assimilation for climate research: Model parameter estimation of large-scale condensation scheme. J. Geophys. Res. Atmos.125, e2019JD031304 (2020).
-
A. J. Geer, Physical characteristics of frozen hydrometeors inferred with parameter estimation. Atmos. Meas. Tech.14, 5369–5395 (2021).
-
J. Berner, U. Achatz, L. Batté, L. Bengtsson, A. de la Cámara, H. M. Christensen, M. Colangeli, D. R. B. Coleman, D. Crommelin, S. I. Dolaptchiev, C. L. E. Franzke, P. Friederichs, P. Imkeller, H. Järvinen, S. Juricke, V. Kitsios, F. Lott, V. Lucarini, S. Mahajan, T. N. Palmer, C. Penland, M. Sakradzija, J.-S. von Storch, A. Weisheimer, M. Weniger, P. D. Williams, J.-I. Yano, Stochastic parameterization: Toward a new view of weather and climate models. Bull. Am. Meteorol. Soc.98, 565–588 (2017).
-
M. Bocquet, J. Brajard, A. Carrassi, L. Bertino, Data assimilation as a learning tool to infer ordinary differential equation representations of dynamical models. Nonlinear Processes Geophys.26, 143–162 (2019).
-
A. J. Geer, Learning earth system models from observations: Machine learning or data assimilation? Philos. Trans. R. Soc. A Math. Phys. Eng. Sci.379, 2020008 (2021).
-
N. Huneeus, F. Chevallier, O. Boucher, Estimating aerosol emissions by assimilating observed aerosol optical depth in a global aerosol model. Atmos. Chem. Phys.12, 4585–4606 (2012).
-
D. L. Williamson, The evolution of dynamical cores for global atmospheric models. J. Meteorol. Soc. Jpn.85B, 241–269 (2007).
-
S. Xie, J. Boyle, S. A. Klein, X. Liu, S. Ghan, Simulations of arctic mixed-phase clouds in forecasts with CAM3 and AM2 for M-PACE. J. Geophys. Res. Atmos.113, D04211 (2008).
-
A. J. Geer, K. Lonitz, P. Weston, M. Kazumori, K. Okamoto, Y. Zhu, E. H. Liu, A. Collard, W. Bell, S. Migliorini, P. Chambon, N. Fourrié, M.-J. Kim, C. Köpken-Watts, C. Schraff, All-sky satellite data assimilation at operational weather forecasting centres. Q. J. R. Meteorol. Soc.144, 1191–1217 (2018).
-
M. D. Fielding, M. Janisková, Direct 4D-var assimilation of space-borne cloud radar reflectivity and lidar backscatter. Part I: Observation operator and implementation. Q. J. R. Meteorol. Soc. 146, 3877–3899 (2020).
-
M. Janisková, M. D. Fielding, Direct 4D-var assimilation of space-borne cloud radar and lidar observations. Part II: Impact on analysis and subsequent forecast. Q. J. R. Meteorol. Soc.146, 3900–3916 (2020).
-
D. J. Posselt, F. He, J. Bukowski, J. S. Reid, On the relative sensitivity of a tropical deep convective storm to changes in environment and cloud microphysical parameters. J. Atmos. Sci.76, 1163–1185 (2019).
-
H. Morrison, M. van Lier-Walqui, A. M. Fridlind, W. W. Grabowski, J. Y. Harrington, C. Hoose, A. Korolev, M. R. Kumjian, J. A. Milbrandt, H. Pawlowska, D. J. Posselt, O. P. Prat, K. J. Reimel, S.-I. Shima, B. van Diedenhoven, L. Xue, Confronting the challenge of modeling cloud and precipitation microphysics. J. Adv. Model. Earth Syst.12, e2019MS001689 (2020).
-
M. P. Meyers, P. J. DeMott, W. R. Cotton, New primary ice-nucleation parameterizations in an explicit cloud model. J. Applied Met.31, 708–721 (1992).
-
V. M. Krasnopolsky, M. S. Fox-Rabinovitz, D. V. Chalikov, New approach to calculation of atmospheric model physics: Accurate and fast neural network emulation of longwave radiation in a climate model. Mon. Weather Rev.133, 1370–1383 (2005).
-
T. Schneider, S. Lan, A. Stuart, J. Teixeira, Earth system modeling 2.0: A blueprint for models that learn from observations and targeted high-resolution simulations. Geophys. Res. Lett.44, 12,396–12,417 (2017).
-
M. van Lier-Walqui, H. Morrison, M. R. Kumjian, K. J. Reimel, O. P. Prat, S. Lunderman, M. Morzfeld, A Bayesian approach for statistical–physical bulk parameterization of rain microphysics. Part II: Idealized Markov chain Monte Carlo experiments. J. Atmos. Sci.77, 1043–1064 (2020).
-
L. A. Regayre, J. S. Johnson, M. Yoshioka, K. J. Pringle, D. M. H. Sexton, B. B. B. Booth, L. A. Lee, N. Bellouin, K. S. Carslaw, Aerosol and physical atmosphere model parameters are both important sources of uncertainty in aerosol ERF. Atmos. Chem. Phys.18, 9975–10006 (2018).
-
J. S. Johnson, L. A. Regayre, M. Yoshioka, K. J. Pringle, L. A. Lee, D. M. H. Sexton, J. W. Rostron, B. B. B. Booth, K. S. Carslaw, The importance of comprehensive parameter sampling and multiple observations for robust constraint of aerosol radiative forcing. Atmos. Chem. Phys.18, 13031–13053 (2018).
-
S. Rasp, M. S. Pritchard, P. Gentine, Deep learning to represent subgrid processes in climate models. Proc. Natl. Acad. Sci. U.S.A.115, 9684–9689 (2018).
-
N. D. Brenowitz, C. S. Bretherton, Spatially extended tests of a neural network parametrization trained by coarse-graining. J. Adv. Model. Earth Syst.11, 2728–2744 (2019).
-
A. Gettelman, D. J. Gagne, C.-C. Chen, M. W. Christensen, Z. J. Lebo, H. Morrison, G. Gantos, Machine learning the warm rain process. J. Adv. Model. Earth Syst.13, e2020MS002268 (2021).
-
H. Morrison, M. van Lier-Walqui, M. R. Kumjian, O. P. Prat, A Bayesian approach for statistical–Physical bulk parameterization of rain microphysics. Part I: Scheme description. J. Atmos. Sci.77, 1019–1041 (2019).
-
A. McGovern, R. Lagerquist, D. J. Gagne II, G. E. Jergensen, K. L. Elmore, C. R. Homeyer, T. Smith, Making the black box more transparent: Understanding the physical implications of machine learning. Bull. Am. Meteorol. Soc.100, 2175–2199 (2019).
-
D. P. Dee, Bias and data assimilation. Q. J. R. Meteorol. Soc.131, 3323–3343 (2005).
-
R. Forbes, A. Greer, K. Loniz, M. Ahlgrimm, Reducing systematic errors in cold-air outbreaks. ECMWF Newsl. 17–22 (2015).
-
J. Gray, S. Chaudhuri, A. Bosworth, A. Layman, D. Reichart, M. Venkatrao, F. Pellow, H. Pirahesh, Data cube: A relational aggregation operator generalizing group-by, cross-tab, and sub-totals. Data Min. Knowl. Disc.1, 29–53 (1997).
-
B. L. Cheong, R. D. Palmer, M. Xue, A time series weather radar simulator based on high-resolution atmospheric models. J. Atmos. Oceanic Tech.25, 230–243 (2008).
-
A. Ryzhkov, M. Pinsky, A. Pokrovsky, A. Khain, Polarimetric radar observation operator for a cloud model with spectral microphysics. J. Appl. Meteorol. Climatol.50, 873–894 (2011).
-
M. Oue, A. Tatarevic, P. Kollias, D. Wang, K. Yu, A. M. Vogelmann, The cloud-resolving model radar SIMulator (CR-SIM) Version 3.3: Description and applications of a virtual observatory. Geosci. Model Dev.13, 1975–1998 (2020).
-
H. Masunaga, T. Matsui, W. K. Tao, A. Y. Hou, C. D. Kummerow, T. Nakajima, P. Bauer, W. S. Olson, M. Sekiguchi, T. Y. Nakajima, Satellite data simulator unit: A multisensor, multispectral satellite simulator package. Bull. Am. Meteorol. Soc.91, 1625–1632 (2010).
-
A. Bodas-Salcedo, M. J. Webb, S. Bony, H. Chepfer, J.-L. Dufresne, S. A. Klein, Y. Zhang, R. Marchand, J. M. Haynes, R. Pincus, V. O. John, COSP: Satellite simulation software for model assessment. Bull. Am. Meteorol. Soc.92, 1023–1043 (2011).
-
R. Saunders, J. Hocking, E. Turner, P. Rayer, D. Rundle, P. Brunel, J. Vidot, P. Roquet, M. Matricardi, A. Geer, N. Bormann, C. Lupu, An update on the rttov fast radiative transfer model (currently at version 12). Geosci. Model Dev.11, 2717–2737 (2018).
-
A. V. Ryzhkov, J. Snyder, J. T. Carlin, A. Khain, M. Pinsky, What polarimetric weather radars offer to cloud modelers: Forward radar operators and microphysical/thermodynamic retrievals. Atmos.11, 362 (2020).
-
K. Suzuki, G. Stephens, A. Bodas-Salcedo, M. Wang, J.-C. Golaz, T. Yokohata, T. Koshiro, Evaluation of the warm rain formation process in global models with satellite observations. J. Atmos. Sci.72, 3996–4014 (2015).
-
R. N. Hoffman, R. Atlas, Future observing system simulation experiments. Bull. Am. Meteorol. Soc.97, 1601–1616 (2016).
-
X. Zeng, R. Atlas, R. J. Birk, F. H. Carr, M. J. Carrier, L. Cucurull, W. H. Hooke, E. Kalnay, R. Murtugudde, D. J. Posselt, J. L. Russell, D. P. Tyndall, R. A. Weller, F. Zhang, Use of observing system simulation experiments in the United States. Bull. Am. Meteorol. Soc.101, E1427–E1438 (2020).
-
F. Harnisch, S. B. Healy, P. Bauer, S. J. English, Scaling of GNSS radio occultation impact with observation number using an ensemble of data assimilations. Mon. Weather Rev.141, 4395–4413 (2013).
-
T. M. Hamill, F. Yang, C. Cardinali, S. J. Majumda, Impact of targeted winter storm reconnaissance dropwindsonde data on midlatitude numerical weather predictions. Mon. Weather Rev.141, 2058–2065 (2013).
-
S. J. Majumdar, A review of targeted observations. Bull. Am. Meteorol. Soc.97, 2287–2303 (2016).
-
R. Buizza, M. Milleer, T. N. Palmer, Stochastic representation of model uncertainties in the ecmwf ensemble prediction system. Q. J. R. Meteorol. Soc.125, 2887–2908 (1999).
-
J. E. Kay, C. Deser, A. Phillips, A. Mai, C. Hannay, G. Strand, J. M. Arblaster, S. C. Bates, G. Danabasoglu, J. Edwards, M. Holland, P. Kushner, J.-F. Lamarque, D. Lawrence, K. Lindsay, A. Middleton, E. Munoz, R. Neale, K. Oleson, L. Polvani, M. Vertenstein, The Community Earth System Model (CESM) large ensemble project: A community resource for studying climate change in the presence of internal climate variability. Bull. Am. Meteorol. Soc.96, 1333–1349 (2014).
-
T. F. Stocker, D. Qin, G.-K. Plattner, M. Tignor, S.K. Allen, J. Boschung, A. Nauels, Y. Xia, V. Bex, P. M. Midgley, IPCC, 2013: Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change (Cambridge Univ. Press, 2013).
-
M. J. Rodwell, T. N. Palmer, Using numerical weather prediction to assess climate models. Q. J. R. Meteorol. Soc.133, 129–146 (2007).
-
S. Hatfield, M. Chantry, P. Dueben, P. Lopez, A. Geer, T. Palmer, Building tangent-linear and adjoint models for data assimilation with neural networks. J. Adv. Model. Earth Syst.13, e2021MS002 521 (2021).
-
T. Palmer, Climate forecasting: Build high-resolution global climate models. Nature515, 338–339 (2014).
-
R. Voors, D. Donovan, J. Acarreta, M. Eisinger, R. Franco, D. Lajas, R. Moyano, F. Pirondini, J. Ramos, T. Wehr, ECSIM: The simulator framework for EarthCARE, in Sensors, Systems, and Next-Generation Satellites XI (International Society for Optics and Photonics, 2007), vol. 6744, p. 67441Y.
(参考文献和注释可上下滑动查看)
从加拿大极端热浪,到德国的洪灾,从澳大利亚的森林大火,到中国河南的特大暴雨,极端天气已经成为新常态。气候变化正以我们所能感知的态势发生着。2021年诺贝尔物理学奖的一半被授予气象学家真锅淑郎和气象学家克劳斯·哈塞尔曼,“以表彰对地球气候的物理建模、量化变化和可靠地预测全球变暖”,表达了对人类命运的关切,也展现出从复杂系统视角研究地球气候环境的必要性。
集智俱乐部将组织地球系统科学读书会,自2021年12月14日开始,每周二晚上19:00-21:00,持续时间预计 7-8 周,重点探讨近年来系统科学、人工智能等学科为地球系统科学提供的创新研究方法,尤其是统计物理与深度学习在地球系统科学中的应用,共读前沿文献,激发科研灵感。欢迎从事相关研究、对相关领域有浓厚兴趣的探索者报名参与交流。
详情请点击:
地球系统科学读书会启动:统计物理与深度学习交叉前沿
点击“阅读原文”,追踪复杂科学顶刊论文