网络重构经典论文:NRI神经关系推理模型 | 论文笔记

这篇文章发表于2018年,作者是图网络领域的代表人物之一Kipf,同时也是图卷积网络的作者。这篇论文首次在学习动力学的同时,学习出了显式的网络结构。文章使用 VAE 的架构,使用GNN + 无监督的方式,通过时间序列数据学习网络结构,并且同时学习网络演化的动力学,即预测网络中节点在未来时刻的状态。本文是对线上论文解读活动内容的整理,课程录播视频已上线,详情见下文。系列读书会目前开放报名中,详情见文末。
论文名称
论文题目: Neural Relational Inference for Interacting Systems 论文地址: https://arxiv.org/abs/1802.04687
论文作者信息
本文要解决的问题
背景
算法框架
-
整体 -
输入:节点时间序列数据 -
输出:网络结构,和未来时刻的节点状态
算法的关键模块
encoder:
-
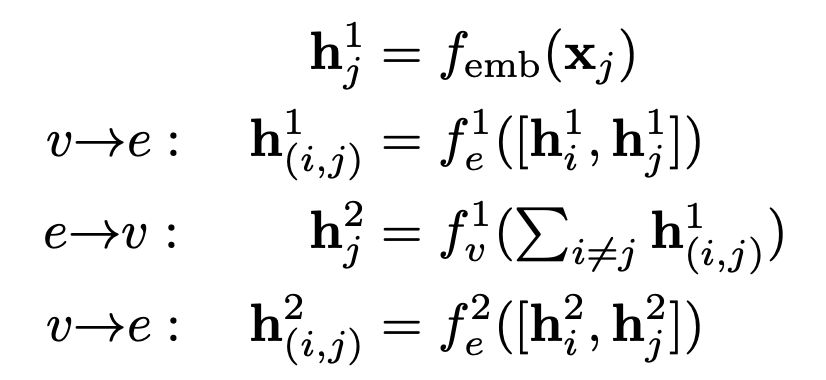
步骤1:首先对节点状态做一次映射,(实验中所有的f函数都代表映射函数,decoder 中主要使用了了 MLP 或者 CNN 作为映射函数); -
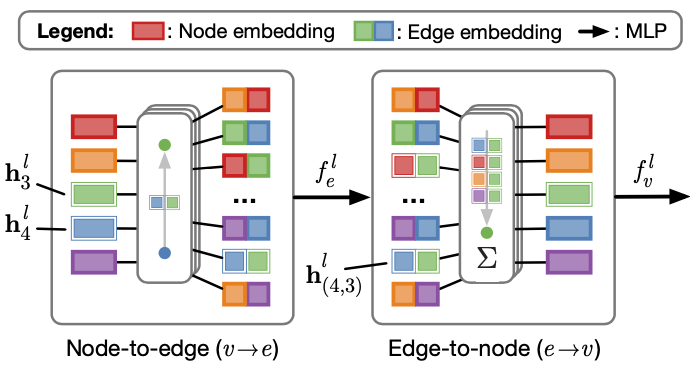
步骤2 v->e:两个节点 concat 组成一条连边,做一次映射后,作为这两个节点边的表示,如下图高亮部分。这一步用到的网络结构是一个全连接的网络,也可以是一个加入了先验的网络;

-
步骤3 e->v:再把每条连边的信息分别进行求和,代表汇聚连边信息,作为消息传递过程,得到更新后的节点表示;

-
为了让消息传递更充分,在 decoder 环节进行了多次 v-e-v 的映射,最终输出的 h(i,j) 作为系统的网络连边概率分布。
gumbel-softmax采样:
gumbel-softmax采样:

通常的采样过程会让梯度断裂,导致模型无法反传梯度。这里采用了 gumbel-softmax 采样的数学技巧,主要做了两件事情:
-
给上一步得到的网络概率分布加上一个 gumbel 随机数 g,让模型可以依概率采样,也就是重参数化的过程;
-
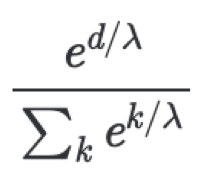
将采样过程转化为一个连续计算的近似(公式如下),让概率最大的值指数爆炸,逼近1,其他的概率逼近0,模拟采样的过程。(公式中的 d 就代表上面 hij 矩阵中每一条边中每类边类型的概率分布,λ是一个超参数)
decoder:
输入:采样得到的邻接矩阵 z_ij,t 时刻的节点状态

decoder是经典的图网络的工作原理,完成了连边到节点的映射,在节点上加入了连边的信息,从而达到预测节点下一时刻状态的目的。
论文的实验和结果
实验一:物理模型重构与预测
-
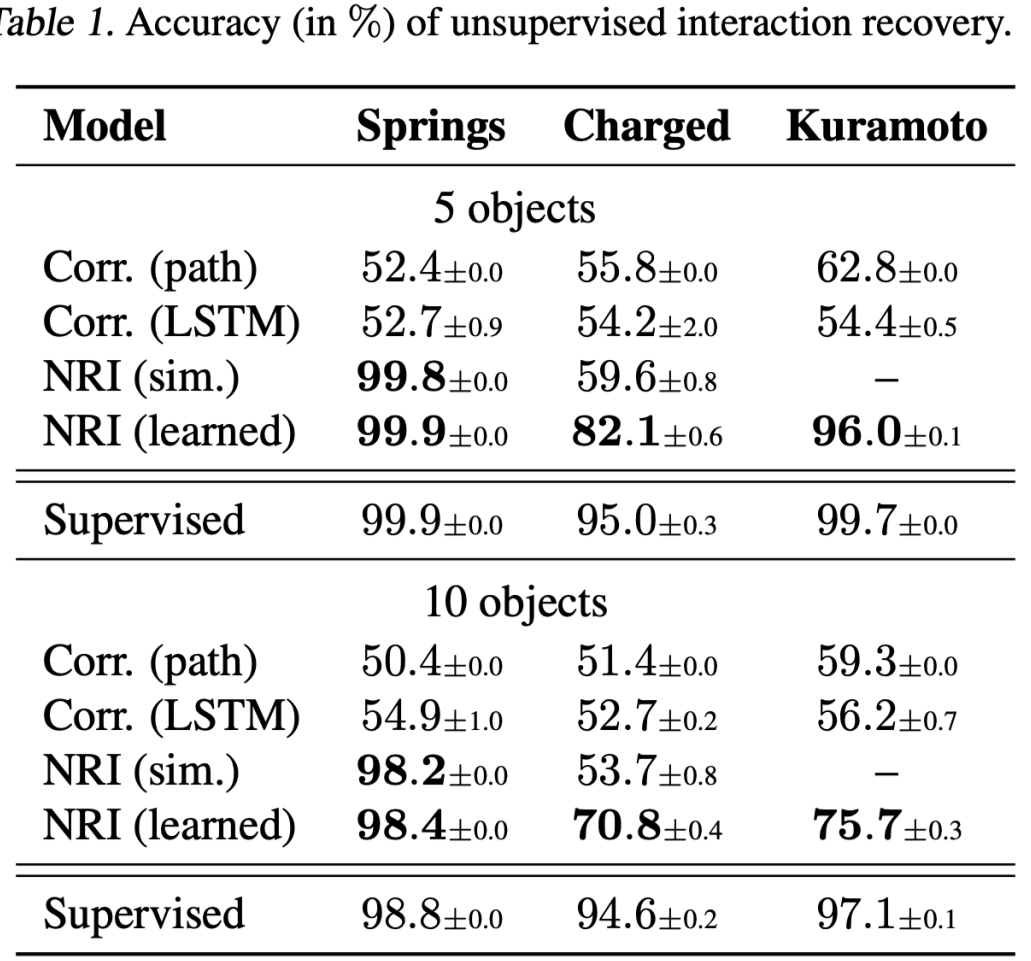
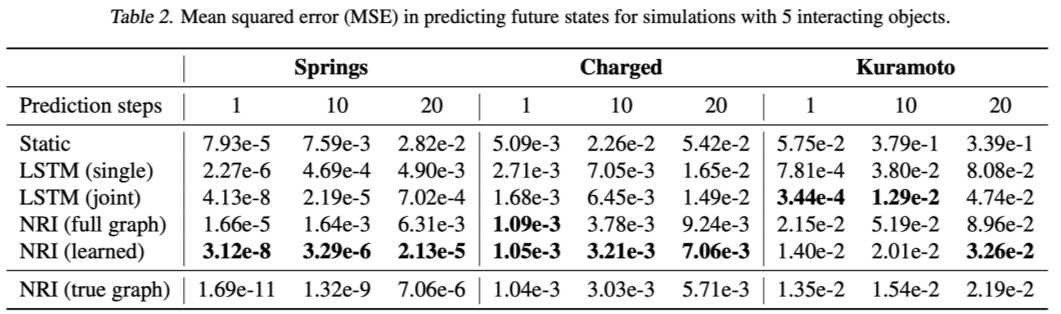
使用三个物理模型(弹簧振子,带电粒子,Kuromoto),对模型中的节点连边进行重构,同时预测未来时刻的状态; -
NRI 在与其他重构方法的对比中取得了 state of art 的效果。
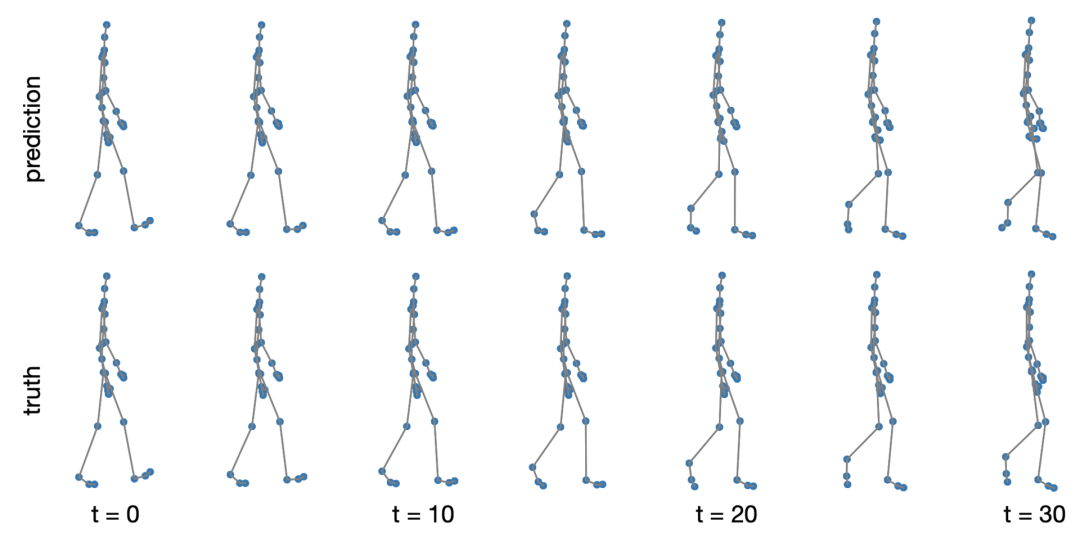
实验二:人体动作捕捉
-
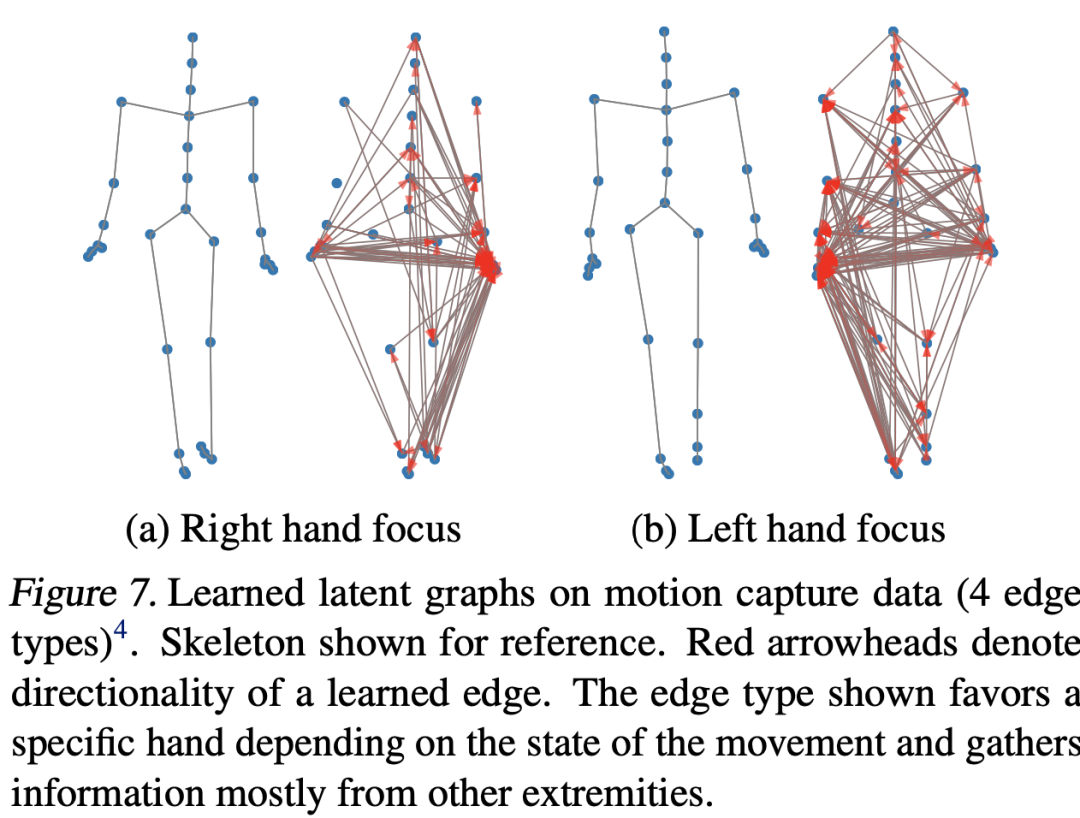
使用 Motion capture 数据集,重构人体动作的连边,同时对未来状态做出动作预测; -
不仅找出了人体的人体骨架图,还找出了隐性的连边;动作预测效果也非常好(t = 30时出现误差)。
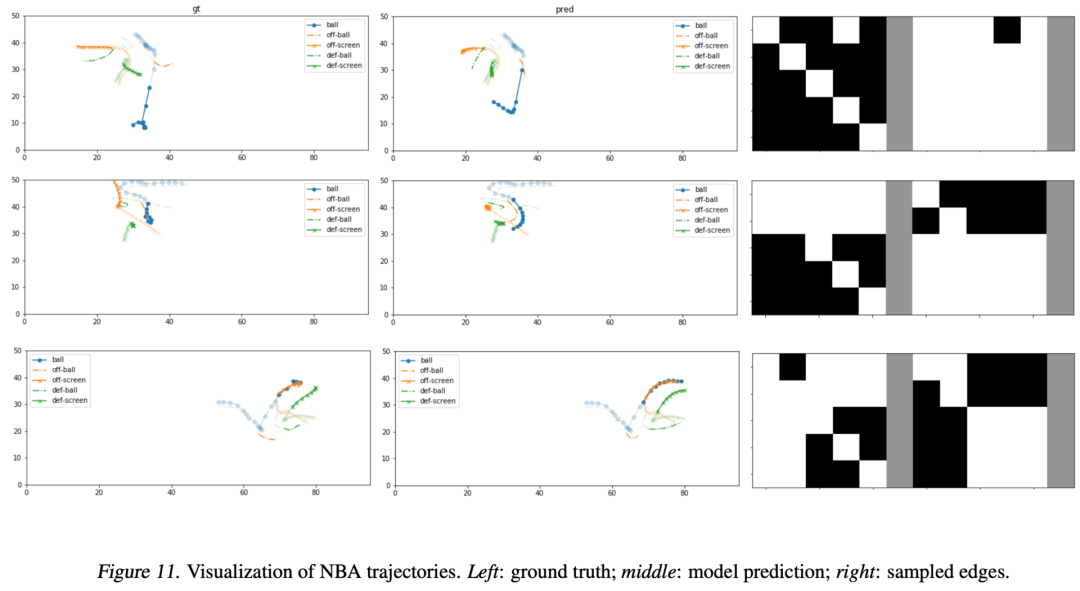
实验三:NBA数据实验
-
使用 NBA 比赛的图像数据,选择”挡拆“环节的相关运动员与球数据;
-
包含了 5 个节点:球,持球者,保护者,进攻者, 保护进攻者;
-
预测这 5 个节点的运动轨迹,以及重构出对应的相互作用网络。
讨论与思考
“面向复杂系统的人工智能”
系列闭门读书会报名中
“面向复杂系统的人工智能”
系列闭门读书会报名中
读书会主题
本次读书会将会围绕下面二个子主题,分别是:
-
基于深度学习的复杂系统自动建模 -
基于可解释性的因果推断方法论
读书会目的
网络几何与深度学习—2018集智凯风研读营
参与方式及时间
时间:
推荐阅读
集智俱乐部QQ群|877391004
商务合作及投稿转载|swarma@swarma.org
◆ ◆ ◆
搜索公众号:集智俱乐部
加入“没有围墙的研究所”

让苹果砸得更猛烈些吧!
👇点击“阅读原文”,了解更多论文信息
微信扫一扫,分享到朋友圈











