复杂网络动力学机器学习自动建模

背 景
问 题
问 题
论文题目:
Neural Dynamics on Complex Networks
论文地址:
https://www.kdd.org/kdd2020/accepted-papers/view/neural-dynamics-on-complex-networks

不同网络结构与动力学下的节点状态变化情况
相关工作
相关工作
基本思路
基本思路

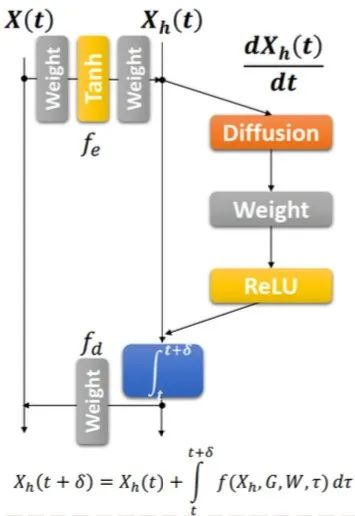
算法框架
算法框架
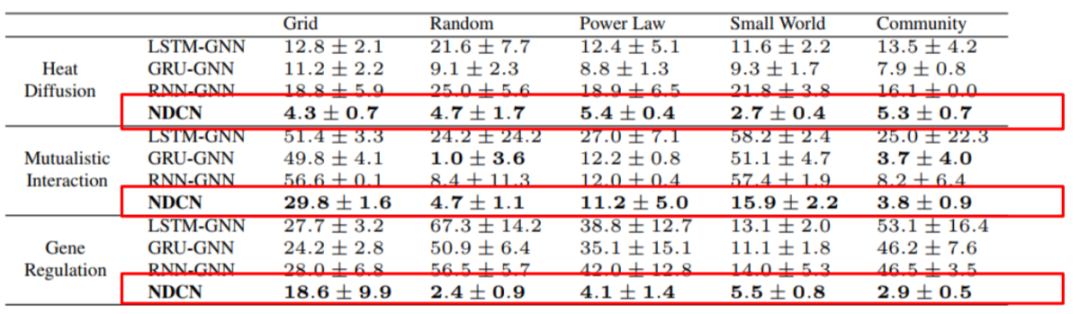
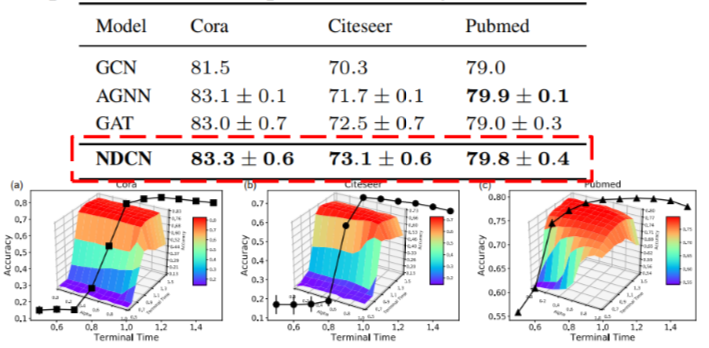
实 验
实 验

总 结
总 结
讲者:臧承熙 整理:张章 编辑:邓一雪

复杂科学最新论文
集智斑图收录来自 Nature、Science 等顶刊及arXiv预印本网站的最新论文,包括复杂系统、网络科学、计算社会科学等研究方向。每天持续更新,扫码即可获取:
推荐阅读
集智俱乐部QQ群|877391004
商务合作及投稿转载|swarma@swarma.org
◆ ◆ ◆
搜索公众号:集智俱乐部
加入“没有围墙的研究所”

让苹果砸得更猛烈些吧!
👇点击“阅读原文”,追踪复杂科学顶刊论文
微信扫一扫,分享到朋友圈











