Nat. Commun. 速递:用统计真实性学习自然驾驶环境

关键词:深度学习,自动车辆驾驶,统计真实性


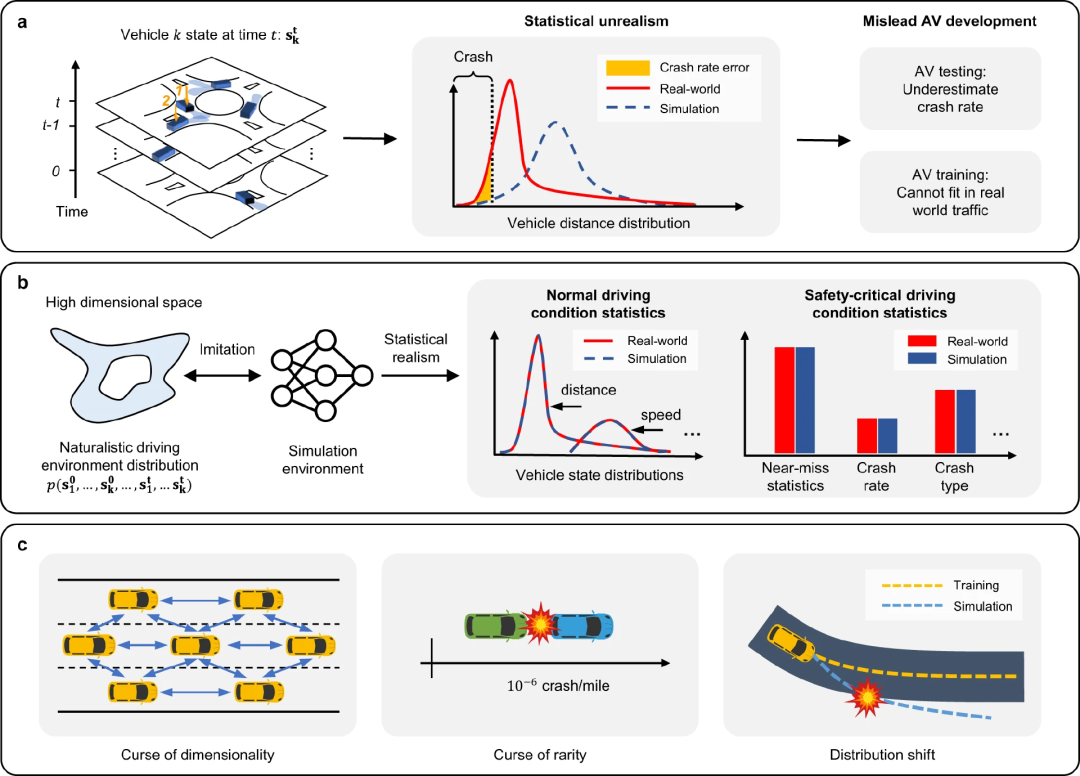
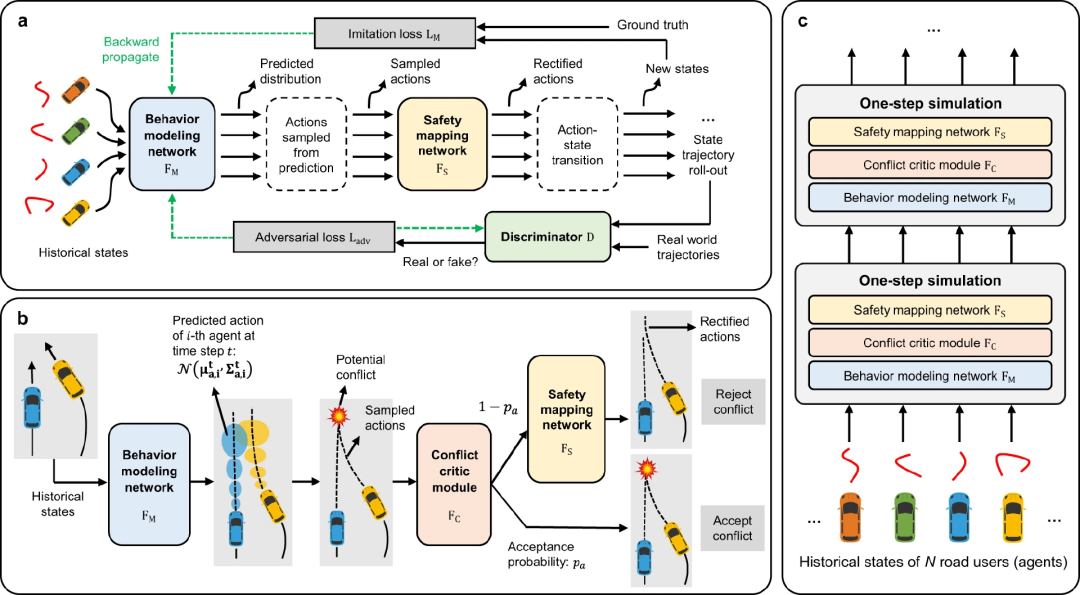
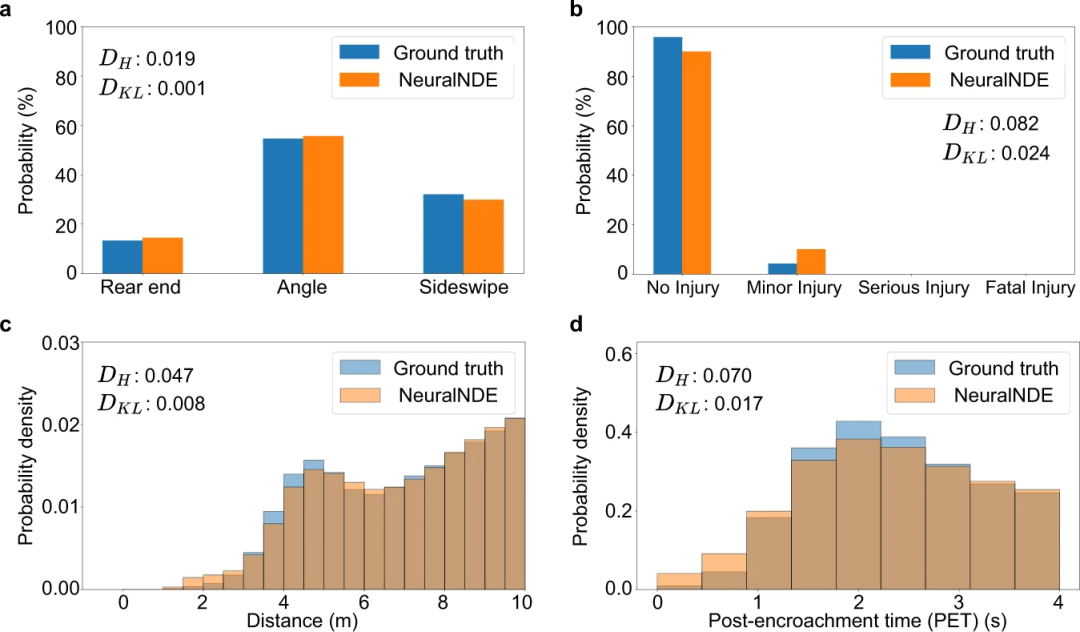
论文题目:Learning naturalistic driving environment with statistical realism 论文来源:Nature Communications 论文链接:https://www.nature.com/articles/s41467-023-37677-5
复杂科学最新论文
推荐阅读
微信扫一扫,分享到朋友圈

关键词:深度学习,自动车辆驾驶,统计真实性
论文题目:Learning naturalistic driving environment with statistical realism 论文来源:Nature Communications 论文链接:https://www.nature.com/articles/s41467-023-37677-5
复杂科学最新论文
推荐阅读










