关键词:人工智能,泛化能力,隐空间动力学,神经常微分方程
Metalearning Generalizable Dynamics from Trajectories
https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.131.067301
像许多职业一样,物理学家正在尝试利用人工智能(AI)来辅助工作——希望不会被 AI 取代。在这个方向上,研究人员开发出一种 AI 算法,可以分析一组物体的运动,如摆动的钟摆或弹跳的弹簧玩具,然后利用这些信息来建立通用模型,分析这些系统上的作用力。这种方法可以推广到此前未经研究的物体,速度比其他不试图泛化的 AI 方法快100倍。
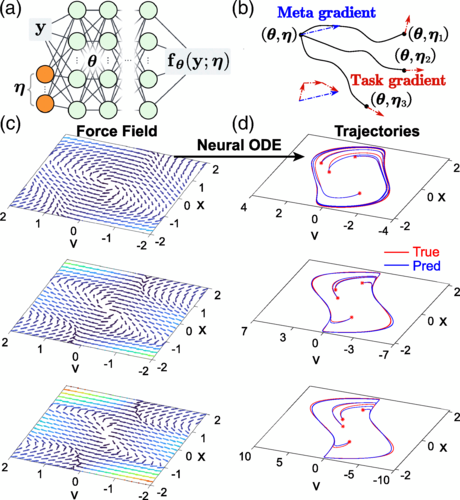
物理学家之前已经表明,AI 算法可以自动发现复杂数据中的隐藏关系。然而,对这些算法的一个常见批评是它们太过具体,只针对一种特定系统。这项最新研究提出一种可解释的元神经常微分方程(interpretable meta neural ordinary differential equation,iMODE)方法,用于从多个具有不同物理参数的动力系统的轨迹中快速学习(非参数特定的)通用动力学。
具体而言,该方法采用一种双层优化框架——外层捕捉研究的动力系统实例的共同力场形式,内层适应个体系统实例——来学习元知识,即动力系统实例的力场泛函变化,而无需知道物理参数。先验物理知识,例如保守力场和欧几里德对称性,可以作为归纳偏差方便地嵌入神经网络架构中。借助学习到的元知识,该方法可以在几秒内对未知系统建模,并且可以反向揭示关于系统物理参数的知识,利用观察轨迹来“测量”未知系统的物理参数。
在其中一个例子中,研究人员向算法提供一组轨迹,如下落的弹簧玩具的位置和速度,每个弹簧玩具刚度不同。该算法分析了这些轨迹,然后构建了一个具有可调参数的通用模型,使其能够在约一分钟时间内分析任何弹簧玩具的运动,即使是不在其训练集中的弹簧玩具。对于更简单的系统,如单摆和振荡电路,分析可能只需几秒钟。研究团队预计,这种方法可以应用于不同介质中生物细胞的机械分析,或者用于在快速变化的环境中控制机器人。
本文编译自:https://physics.aps.org/articles/v16/s119
大模型与生命医学:
AI + Science第二季读书会启动
详情请见:
大模型与生物医学:AI + Science第二季读书会启动
推荐阅读