PNAS速递:微型软体机器人的单步精确编程
2024-03-31
2,075

关键词:软体机器人,人工智能
论文题目:Single-step precision programming of decoupled multiresponsive soft millirobots
论文链接:https://www.pnas.org/doi/10.1073/pnas.2320386121
在现代工程和科学研究中,软体机器人技术因其独特的适应性和灵活性而受到广泛关注。这些机器人能够模仿生物体的行为,展现出对环境刺激的响应能力,如温度、湿度和磁场等。尤其在医疗、康复机器人、人工智能和软电子领域,软体机器人展现出巨大的应用潜力。然而,精确编程软体机器人的形态变化,并实现对多重响应的解耦,是提高其自由度和多功能性的关键。目前,许多设计依赖于复杂的组装过程或者多重响应的耦合,这限制了机器人执行复杂变形的能力,并影响了制造的精度。
最新发表于PNAS的一项研究提出了一种单步精确编程技术,用于制造能够响应独立解耦环境刺激进行复杂多步形态变化的软体微型机器人。研究团队通过采用多层弹性体和激光扫描技术,选择性地加工微型软体机器人的结构,实现了30微米的最小加工精度。
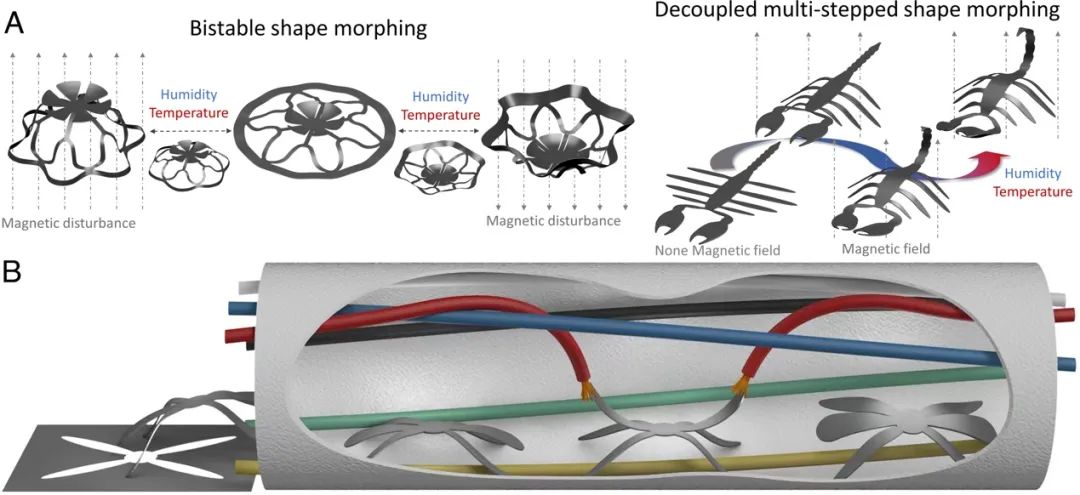
借助单步精确编程技术,这种软体机器人具备高度的解耦能力,体现为每个反应或行为都可以单独地根据特定的外部刺激进行调整,而不会影响其他功能或反应。因此,机器人在运动过程中可以进行形态变化,并执行逻辑电路控制,同时对湿度、温度和磁场等因素显示远程修复电路的反应。研究团队通过利用干凝胶、激光诱导石墨烯(LIG)和整体材料激光图案化,成功地实现了多步骤的形态改变,并创造出包括仿生形状、手势、剪纸建筑、弹出结构和双稳态结构在内的多样化结构。
此外,研究团队还开发了理论模型,并采用有限元分析(FEA)预测和设计微型软体机器人的形态改变行为,并展示出蝎子般移动效果。该系列微型软体机器人所表现出来的高度可编程性以及解耦特性,使其具备强大的环境适应能力。该技术有助于进一步开发具备物理智能、适应复杂环境变化的多功能机器人。
点击“阅读原文”,报名读书会