到目前为止,只有少数实验成功地演示了大量的自治自组织机器人,而集群机器人的实践应用仍是一片空白。
研究领域:群体智能,集群机器人,自组织,演化算法
Marco Dorigo、Guy Theraulaz、Vito Trianni | 作者
鄢鹏高 | 译者
赵雨亭 | 审校
邓一雪 | 编辑
论文题目:
Swarm Robotics: Past, Present, and Future
论文地址:
https://ieeexplore.ieee.org/abstract/document/9460560
目录:
1、集群机器人历史概述
2、经验教训和开放问题
3、新方向和新问题
4、未来应用如何指导研究
5、总结
集群机器人(swarm robotics)涉及大集群机器人的设计、建造和部署,它们能够相互协调并协同解决问题或者执行任务。集群机器人的灵感来源于自然自组织系统,例如社交昆虫,鱼类或鸟群,它们都是基于简单本地交互规则的涌现性群体行为(emergent collective behavior)[1][2]。通常而言,集群机器人从这些自然系统的研究中提取工程原理,从而构建具有可比能力的多机器人系统。通过这种方式,集群机器人旨在构建比单个机器人更加鲁棒、更强容错和更高灵活的系统,并且能够更好地调整自身行为来适应环境变化。
集群机器人作为群体智能的一项应用[3][4](即集体、自组织行为的计算模型[5][6]),已经孵化了数个成功的优化算法,它们被广泛应用于电信行业[7]以及人群行为的模拟和预测[8]。然而,人们很快发现,要在机器人中实现群体行为,需要的不仅仅是将群体智能算法应用于现有的机器人平台上。实际上,研究人员需要完全重新思考传统的机器人功能,例如感知、控制、定位和机器人平台本身的设计。在过去的二十年里,集群机器人的研究人员取得了重大进展,他们为集群机器人的潜能提供了概念证明,也使得研究人员能够更好地理解自然界中复杂行为是如何出现的。尽管如此,将这项研究转化为实践仍然充满挑战,需要研究人员去妥善解决。事实上,到目前为止,只有少数实验成功地演示了大量的自治自组织机器人,而集群机器人的实践应用仍是一片空白。研究人员需要更多的研究来建立相关理论和进行实践,从而将集群机器人从实验室带入现实世界。本文的后续内容组织如下,在简要介绍集群机器人领域的历史之后,研究人员总结了在其开拓阶段学到的主要经验教训,分析了主要的开放式挑战,并给出了几个创新和有前景的研究方向的例子。最后,通过展示单个机器人无法解决的应用场景,或由传统的集中方式控制的多机器人无法解决的应用场景,研究人员提出了集群机器人最有可能的应用领域,并评估了其对选定行业的潜在影响。
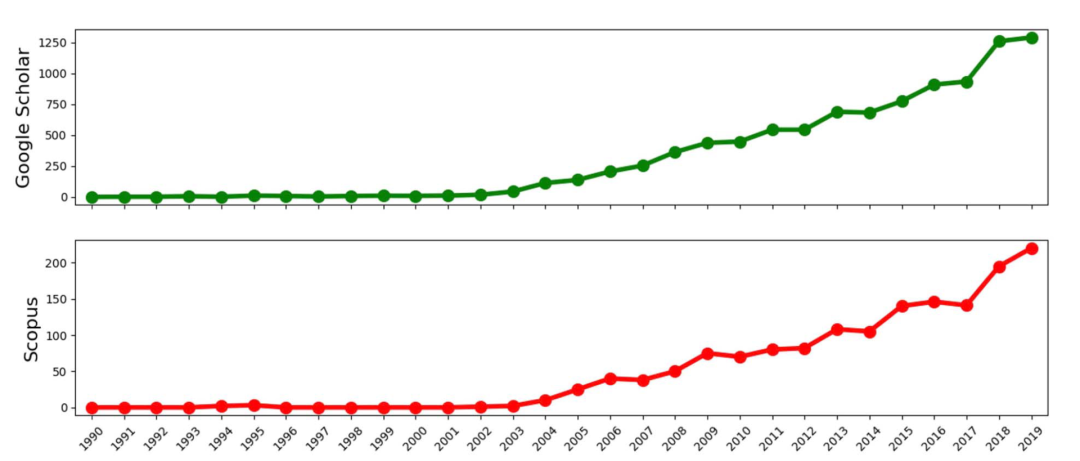
在过去的20年里,集群机器人已经从由几个具有明确生物学灵感的研究[9-12]所发起的小领域发展为全球多个实验室和研究人员参与的成熟领域。通过使用谷歌学术进行搜索,“集群机器人”这个词在1991年首次出现,而且其使用范围非常有限。这种情况一直持续到2003年,此后该词的使用开始大幅增长。同样地,使用SCOPUS进行搜索也会得到类似的增长趋势(如图1所示)。这些数据表明,尽管集群机器人研究的基础源自20世纪90年代的一些开创性著作,但该领域的研究直到2000年才开始显著增长。
图 1. 在谷歌学术和Scopus中搜索“集群机器人”的引用计数,图中显示了2000年后的变化趋势。
最初,对集群机器人的研究旨在测试使用stigmergy(本文中使用的各项概念的定义见表1)作为机器人之间间接通信和协调的手段。跟随着早期研究[9-11]的步伐,2000年之后出现了一些专注于对象检索(foraging [13];Stick pulling[14])、聚类[15]和对象排序[16]的研究。这些研究始于观察所得的群居昆虫的已知行为,并且部署了具有相似行为的集群机器人。在少数情况下,集群机器人被用来紧密复制在生物系统中观察到的动态(例如,蟑螂群的聚集[17]),这产生了生物-机器人混合社会[18]的先例。此外,机器人集群还被用作解决生物学问题的工具(例如,寻找食物源和巢穴之间最短路径的道路网络几何结构(trail network geometry)是什么[19])。
2001年至2005年间,由欧盟委员会资助的Swarm-bots项目是研究集群机器人合作的第一个国际项目。在该项目中,一个由多达20个机器人组成的具有自组装能力的群(即物理上彼此连接以形成协作结构)被用于研究一些群体行为,例如集体运输、区域覆盖和目标搜索[25, 26]。这些机器人能够随着时间推移在集群中扮演着不同的角色,这是迄今为止唯一一个由机器人组成的自组织团队合作解决复杂任务的例子。Swarmanoid项目(2006-2010)将Swarm-bots中的思想和算法扩展到由三种类型的机器人组成的异构机器人集群中(飞行机器人、爬升机器人和地面机器人),从而协作执行搜寻和检索任务[28, 29]。
在成功演示了集群机器人范式的同时,有关硬件小型化的研究有望部署数百个、甚至数千个协作机器人(如图2所示)。机器人变得越来越小、越来越简约,甚至可以尝试在毫米尺度上对其进行设计。然而,硬件小型化以及将足够多的传感器套件进行集成带来的挑战阻碍了这一发展进程。仅仅几年后,kilbot[30],一个支持1000个机器人实验的硬件概念出现了。Kilobots的设计初衷是向为结构塑性[31](shape formation)而设计的大型机器人集群的首次演示提供支持,后来它又被运用于几项成功的研究,使得集群机器人能够在具有数百个机器人的物理环境中进行演示[32-34]。
图2. 一些主要用于集群机器人研究的机器人:(a)jasmine [35](图源于维基共享资源);(b)alice [36] (照片由Simon Garnier提供);(c)kilobots [30](照片由Massimo Berruti提供);(d)e-pucks [37];(e)swarm-bots [26];(f)swarmanoid [29]
集群机器人并不局限于地面平台:最近的一些工作考虑了水面[38]和水下机器人[39],以及成群的无人机[40, 41]。虽然水生技术和水下技术还需要大量的开发努力才能成熟,但是无人机已经商业化,并且在不同领域的遥感应用中代表着一个非常有前途的平台,目前只是由于缺乏授权自主和集体飞行的法律框架而受到阻碍。
除硬件平台外,如何控制机器人集群已成为研究的主要焦点。迄今为止已有众多文献提供了不同方法的报告,然而这超出了本文的研究范畴(感兴趣的读者可以参阅[42-46])。目前主要的研究方向包括:开发集群系统的分析模型来指导机器人的实现[47–49];采用(进化)优化方法,使用极简控制器(神经网络[50]、无需计算的控制器[51, 52]、有限状态机[53],或是基于语法的控制器[54])来引导机器人;开发设计和验证方法[20,55]。正如下文将要讨论的,定义一个可靠和有效的机器人集群的工程方法仍然是当前研究的前沿,未来几年仍需在这方面努力。
表 1. 术语表
|
|
|
|
|
一种开发用于机器人集群的制软件的方法,其中设计问题被转化为优化问题。不同的设计选择定义了优化算法所探索的搜索空间。
|
|
|
对某问题的可复用解决方法的正式定义,通常在某一领域重复出现。在集群机器人中领域中,设计模式描述了如何定义个体规则来获取期望的自组织宏观行为(例如集体决策,参见[20,21])。
|
|
|
一类优化算法,其中初始候选解决方案集合被生成并且通过某种机制被迭代地更新,该机制受到了生物演化的启发。解决方案的种群通过模仿重生、复制、重新结合和选择的自然过程逐渐演化来最大化目标函数(适应度)。
|
|
|
|
|
|
|
|
Model-free& model-based reinforcement learning
|
强化学习的两种不同的方法,机器学习的子集,其中软件代理通过尝试最大化其行为的激励函数来学习在给定环境中高效执行任务。在基于模型的方法中,代理被给定或者学习某个函数来将自身当前状态和行为映射到下一状态(环境的模型),以至于它能够提前知道下次动作的收益;在无模型方法中,代理通过不断试错来找到好的策略,而不直接借助于环境模型。
|
|
|
某种物理过程,其中物质从一个物理状态变为另一个物理状态,例如将水冷冻成冰(液体至固体)或加热水以产生水蒸气(液体至气体)。生物系统中无序和有序状态的存在与物理惰性世界中类似状态或相位的存在有正式的类比:无序-液体,有序-晶体固体。这些系统在各种状态或相位之间存在相位变化。特别地,有序状态的特征在于整个系统尺度上的顺序概念可以用一个有序参数来量化(例如,鱼群的排列/极化的质量)。
|
|
|
在不同于设计时所考虑的环境条件下继续有效工作的能力。
|
|
|
当系统组件的数量(或一般来说,系统资源的数量)发生显著变化时,系统继续正常运行的能力。
|
|
|
系统全局级别上的模式仅从系统较低级别组件之间的交互中出现的过程。指定系统组件间交互的规则只使用本地信息执行,而没有任何中央集权决定它们的行动[1]。
|
|
|
一种自然或人工代理之间的间接通信形式,其中某代理所执行的工作会在环境中留下痕迹,刺激相同或其他代理执行后续工作。通过环境的这种调解确保协调代理商所执行的行动。它最早由Grasse[22]描述,在支持群体机器人的自组织机制方面发挥了重要作用[23, 24]。
|
尽管集群机器人的最终目标是生产方法和工具,使得部署机器人集群来解决现实世界的问题成为可能,但目前的焦点仍然是科学理解这些方法和工具的机制。前二十年的研究留下了宝贵的经验教训,也提出了一些有待解决的开放问题。
首先,研究人员了解到,目前机器人集群可以执行的任务类型受到自主机器人有限能力的强烈限制。为了在集群中工作,每个机器人必须能够互动和交流,并且能够识别同伴和他们的工作。这需要定制的硬件设计和特定的传感、处理和交互能力。目前在机器人硬件和控制方面的局限性从两方面限制了集群机器人研究的复杂性。一方面,已有特定的机器人被开发出来解决特定的(玩具式的)问题(例如,termes [56]和kilobots [30])。这些例子开辟了新的研究方向,但可重用组件并非总可移植到不同的上下文环境中。另一方面,通用机器人(alice[19, 57]和e-puck[37])已经被用于产生概念证明,通常处理一些由自组织自然系统在人工世界中执行的类似任务(例如,觅食[13, 34])的直接转换任务。然而,当硬件不是为集群机器人设计时,日常工作可能会变得非常繁琐:这是因为研究人员需要同时处理数十个或可能数百个机器人,从而使得简单操作(例如充电或上传软件)变得非常冗长繁琐。这往往限制了被测试集群中机器人的数量,降低了演示的广度和重要性。最后,值得一提的是,对于实验室中使用大量集群的实验和许多未来的应用程序而言,硬件小型化将是一个关键元素。但是硬件规模的缩小带来了极其困难的问题,到目前为止,这些问题尚未解决[58]。
为了推动集群机器人研究的进程,研究人员需要开发工具使得集群机器人的研究人员更容易分享结果和复现实验。一些通用机器人平台则是非常有价值的工具。e-puck[37]可能是迄今为止使用最多的集群机器人平台,但是当e-puck的个数超过30个时,研究活动将变得非常复杂和昂贵。专为集群机器人研究而设计Kilobot被广泛应用,但其能力严重受限,以至于虚拟化环境被提出从而增加研究的可能性[59, 60]。虽然Crazyflies[61]不是为集群集群机器人研究而设想的,它们也越来越多地被用作集群机器人研究的飞行平台[41]。研究人员仍然需要大量的努力来研发集群机器人的硬件,从而满足研究团体的需要。首先,研究人员必须在成本、尺寸和板载特性之间找到一个很好的折中方案,确保拥有足够丰富的传感器和执行器,同时保持尺寸的限制,以便在实验室中进行数百个机器人的实验。据此,介于kilobot和e-puck(直径约5厘米)之间的尺寸可能是一个很好的折衷方案。e-puck的成功来自于其采用的模块化方法,使得新的传感器、执行器或计算能力能够进行插件扩展,但这需要精心的设计。当处理大量数据时,尤其是移动机器人不需要人工干预时(例如,将无线充电站集成到实验环境中时,或者使用电动地板进行无电池操作时),同时对多个机器人进行编程和充电的可能性(使用kilobots)会极大简化实验活动。一个能够观察机器人的状态、移动机器人、记录它们所获数据并且实现实验活动自动化的集中系统将会加快研究的进程,并且极大地造福全世界。
模拟硬件也是集群机器人研究的一个基础领域,但其研究问题与物理机器人的研究相似。通常,仿真软件都是从头开始为每个新的机器人集群演示而开发的。开发由研究者们共享的通用模拟工具会是一项显著的进步,因为能够简化研究结果的共享和比较。然而,为了设计这样的工具,研究人员需要更好地理解模拟和现实世界之间的关系。在机器人技术中,这个问题被称为仿真-现实差距[62],即当在现实世界中使用仿真开发的机器人控制器时,仿真中使用的模型和现实世界的模型之间的差异会导致性能下降。这一问题在集群机器人中尤为重要,这是因为许多机器人必须与彼此互动[44],而这种问题将被进一步放大。即使这些差异不能完全消除,理想的机器人集群模拟器也应该保证它们处于最低值。
在众多可用的仿真软件中,ARGoS[63]在支持集群机器人研究方面表现突出。ARGoS通过巧妙的模块化设计和并行仿真的可能性,使得多达10000个机器人进行实时动态仿真成为可能。此外,它还包括了一些最常用的集群机器人模型(e-pucks和kilbots)。另一个有趣的例子是Flightmare[64]。它是一个(多)无人机模拟器,能够对环境进行逼真的渲染,对视觉导航和遥感的研究非常有用。为了在经验上提高并开发一个能够响应集群机器人社区的需求(同时解决模拟-现实差距)的工具,研究人员需要解决和改进几个地方。例如,研究人员将需要设法改进感知的模拟以及物理(机器人-机器人以及机器人-环境)和非物理(通信)交互的模拟。模拟应该以不同的保真度来部署,允许用户在速度和精度之间选择平衡。在大多数情况下,高保真仿真不是强制性的,但它们的可用性将极大地简化从仿真到现实的过渡,支持在真正的机器人上运行广泛的测试。提高模拟的可用性也是必要的,这可以通过提高模拟速度以及提供更简单的处理和控制模拟机器人及其部署环境的方法来实现。模拟应该是高度可配置的,以响应多元化研究社区的需求。同时,建立一个新的模拟配置无需具有与软件内部运行相关的专家知识。最后,将模拟框架与标准机器人工具和库(例如,ROS)进行集成并允许面向机器人平台的交叉编译非常重要的,这样就可以用真实的机器人来测试在模拟中开发的代码,而不需要任何更改或调整。
有了合适的工具,集群机器人研究团体需要为设计问题提供解决方案。事实上,第二个习得的教训就是如何解决微观和宏观问题。鉴于研究人员只能直接对组成集群的单个机器人(微观层面)进行编程,如何设计群体行为(宏观层面)可能是最困难的问题。为了解决这个问题,人们多次尝试提出通用的、可在不同应用程序中重用的设计方法(通常由生物灵感指导),它们包含设计模式[20-21]以及自动设计方法[50, 53, 65]等(参见表1中的术语表)。但是目前而言,这些方法都不够强大:虽然它们成功地解决了相对简单或受限的问题,但随着问题复杂性的增加,它们的局限性也迅速显现。一个复杂任务由几个子任务组成,这些子任务可能需要合作,并且具有相互依赖性和时间限制[66]。人们可能会尝试为每个子任务部署可行的方法,从而获得后续可以组建的模块。然而,这种分而治之的方法并不足以部署可用的集群机器人系统,因为这种方法忽略了任务之间许多可能的相互关系,并且忽视了这些任务可以通过某种方式被进一步划分和调度,从而导致了次优的解决方案。研究人员需要通过持续集成和优化[55]来设计解决子任务之间复杂相互关系的方法。此外,当前的实践需要扩大群体规模,从小群体无缝过渡到大群体。研究人员需要设计在不用考虑集群/问题大小的前提下对机器人集群进行编程的方法,而这些应该在配置时被确定。最后,性能保障是非常必要的,但目前的实践仅限于对性能的统计指标进行经验评估,而没有充分解决性能这一问题。相反,研究人员需要设计一种方法来提供性能界限,从而满足验证和检验标准,并提高机器人集群的可靠性,特别是在有硬性约束的应用领域(例如空间应用)。为了具体地支持研究界,基准是一项宝贵的工具,它能够以定量的方式来衡量研究的进展,还可以在越来越复杂的任务上挑战研究人员 (例如,机器人世界杯[68])。为了直观说明集群机器人研究的进展所需的基准类型,现在研究人员考虑这样一个资源收集问题(就像在NASA Swarmathon[69]竞赛中所做的那样)。为了超越目前的实践,研究人员可以设置问题使其复杂性沿着几个维度进行调整:调整环境大小和拓扑,以测试所提方案适应不同问题实例的能力,并根据群体大小来扩展性能;调整需收集项目的数量和分布,以测试协调开发资源的能力;以及调整项目的类型和持久性,以测试协作进行识别和检索的能力,并适应动态的环境。信息复杂性也应该是多变的,这可以通过允许任务执行的多种替代方案来实现。这将要求集群去收集和聚合与问题相关的信息及其动态,在需要时采取集体决策来优化任务性能。如果可能的话,研究人员应在其时间执行内以可变约束来识别多个相互关联的任务 (例如,对某些项类型给予优先级,以支持对其他类型的检索)。研究人员必须分配清晰的性能指标来跟踪进度,并且支持不同方法之间的比较。如果这些基准被提出并与标准工具相关联(包括前文讨论的硬件和模拟),一个开放的社区将会形成并蓬勃发展,从最佳实践中学习并不断改进已有成果。
第三个教训是理解在机器人集群中被赋予的一些属性(例如,容错性和可伸缩性),它们并非是由集群群自动提供的,而是需要精心的设计。如果想要提供自组织机器人集群本身没有赋予的其他属性,比如鲁棒性、灵活性或适应性(参见表1),那么困难就更大了。人们试图通过理论方法设计具有这些特性的机器人集群,但却忽略了机器人在传感器和执行器方面的实施方式及其具体功能。研究者们已经使用数学模型,抽象粒子系统或多级系统在集群中执行不同行为证明了上述性质(例如聚集[70]、集体运动[71]、集体决策[20]和模式形成[72])。然而,将理论发现转化为可工作的机器人系统通常需要彻底的反思,这包括如何引入必要简化的理论模型中没有考虑的特征和约束,以及如何解释目标应用领域的特性。此外,迄今为止尚有一些关键问题没有得到足够的重视,但它们却是部署实际应用所必需的。研究人员需要能够防止外部攻击的安全性,使得集群能够抵御试图潜入并抓住集群的恶意用户。为了让用户以有意义和轻松的方式与机器人系统进行互动,如何指挥和控制集群也是极其重要的。这也需要高度的解释力,也是促进用户和外行人的接受和信任的集群所必需的。解决好这些问题,将极大提高集群机器人技术,加快其从研究向具体应用的过渡。
第四个学到的教训是,研究人员必须非常小心地使用“生物灵感工具”。从群居昆虫或群居物种的行为中获得灵感在很多情况下都是非常有价值的,这是因为这些自然集群具有的属性和所表现的行为是任意机器人集群的基础:它们是自组织可以普遍工作的事实的“活证据”,它们为特定问题提供了可行的解决方案,例如机器人集群如何以协调的方式移动、分配任务或做出集体决策。在这方面,研究人员要进一步促进生物学的贡献从而提供新的指导原则,这是因为群体智能机制的新见解将继续为集群机器人从业者提供信息。然而,研究人员需要铭记集群机器人研究的长期目标,即在现实世界中部署执行有用任务的机器人集群。因此,如果想将机器人集群与现实世界的应用相关联,研究人员就应该以工程为导向的方法来设计机器人集群。所以当机器人集群所需的行为与特定应用高度相关时,仅仅依靠生物灵感的指导不太显示。因此,研究人员应避免对“生物灵感工具”抱有太多信心,并随时准备在必要时设计特别的解决方案。
同样值得注意的是,尽管生物学家和机器人学家之间的合作卓有成效,但这种合作往往是单向的,并且机器人学所获取的远远大于它对生物学的贡献。研究人员相信这种情形是可以改善的,机器人集群可以真正地帮助生物学家,提供人工的、可控的模型来研究体现(embodiment)、感知、行动的效果,并且提供支持群体行为[19][73]所必需的个体认知要求。此外,将自主机器人集成到自然集群的可能性提供了新的研究方向[18][74]-[76],这些都才刚刚开始探索。
在不久的将来,大多数的集群机器人研究很有可能致力于寻求上述开放问题的答案。这一研究对于该领域进一步发展和技术水平的提高具有重要意义。然而,也有一些研究方向可能会带来更大的飞跃,因为他们可能会调研一些全新的方法或领域。尽管这些领域已被认定为开放问题,但是尚未得到充分研究。研究人员首先讨论当面对新奇和具有挑战性情景时,例如由小尺寸和大量个体带来的极端约束(III-A),或由异构集群机器人在硬件/行为内(III-B)或在其自身组织结构中(III-C)提供的机会,研究人员该如何设计和控制机器人集群。研究人员接下来考虑设计机器人集群的新方向,要么模仿响应能力和适应性的生物启发例子(III-D),要么采用机器学习方法为集群提供学习能力并提高它们的性能(III-E)。最后,研究人员讨论了机器人集群安全(III-F)和人类-集群交互(III-G)进一步研究的必要性,这对现实世界的部署至关重要。
集群机器人技术的目标之一是设计和控制数以千计的简单机器人,实现由简单的个体行为和大量交互产生的集群级别的复杂行为。能够最大限度发挥集群机器人未来影响的一个方面是开发数以千计的微型机器人,其尺寸可以缩小到毫米甚至微米或纳米尺度。这样的集群可以进入狭小的密闭空间(例如,微流体通道和人体)、操纵微观物体(例如,微塑料或单个细胞)以及自组织为局部治疗提供支持(例如,靶向药物输送)。迄今为止的研究只触摸到了一个具有巨大潜力的领域的皮毛。然而,缩小机器人尺寸给集群机器人提供切实可行的解决方案带来了新的挑战。微型机器人和纳米机器人面临着与宏观尺度不同的物理定律,需要新的群体行为模式。当前的微型机器人和纳米机器人并非利用传统的硬件,而是由活性胶体粒子[77]、软体(生物)机器人[78]、细菌驱动的纳米机器[79,80],甚至是可控的基因工程生物体[81]组成。在此类系统中实现和控制群体行为将需要新的范式,因为精确控制个体行为的能力会被强制限制。此外,整合传统的感知和行动方式极具挑战性[82],研究人员需要重新思考设计和控制此类集群的策略。总体而言,研究应侧重于利用少数不可靠传感器、极少或完全缺乏计算能力以及不可靠行为的控制方法[51,52]。设计硬件以呈现自组织特性的解决方案也是合理的 [83,84],尽管在这种情况下,灵活和自适应的行为较难获得。在所有这些情况下,引导自组织比尝试直接控制更有价值。
同构性假设仍然普遍存在于集群机器人的研究中:所有的机器人都是相同的并运行相同的控制软件,它们都是可替换的,只有与(社会)环境交互的个体历史才能导致某种特定行为的表达。这个假设起源于群体行为的理论模型,它通常简化复杂现象以获得易处理性。事实上,同构系统中的自组织通常足以解释实验观察[1]。然而,自然集群的不同个体在生理和行为上可能极为不同,而个体的特点会影响对环境和社会线索的反应[85]。异构性被认为是赋予群体行为灵活性、新条件适应性及应对外部扰动恢复力的基础。这些功能有益于集群机器人,但异构性并没有得到应有的充分利用。前文提及的Swarmanoid 项目通过研究物理异构机器人集群中的协调群体行为,证明了一个可能的方向[29]。其他强大的协作形式允许初始同构的机器人学习不同的行为,当这使群体表现受益时,这些形式就会与特定任务挂钩。然而,解决异构实体所展示的自组织行为的复杂性仍非常具有挑战性,但有望为整个领域带来巨大的进步。
一开始,集群机器人就采用了自组织范式,其中群体控制是通过简单的(随机)规则获得的,这些规则定义了机器人之间及与环境之间的交互方式,而不需要利用任何形式的集中控制或全局知识。然而,在许多情况下,集中式或分层式控制形式可以使设计和控制集群机器人的问题变得更容易。在许多动物社会中,等级制度常与自组织并存,这一事实也可能证明引入某种形式的层级控制是合理的[86][87]。不幸的是,这些方法将需要引入使系统变得脆弱(单点故障)和难以扩展的机制。
选择去中心化还是层级结构,或者如何整合两者,这些问题目前尚未得到充分的研究。在这个方向上,文献[88]首先提出创建混合系统,其中由自组织过程产生的层级控制结构可以以一种特殊的方式动态出现。这与某些集群中发生的情况类似,其中自组织过程会导致线性层次结构的形成和单体繁殖个体的出现[87]。Mathew等人[88]创建了一种基础设施——中间件(middleware),允许集群机器人从纯粹的自组织控制自动切换到层级控制,然后再自动切换回来。虽然实验已经证明了该方法的可行性[88,89],如何将允许创建层级控制结构的规则设计成集群机器人必须执行的任务的函数,以及如何实现由纯自组织控制到层级控制的转变(以及相反的过程)作为任务的函数和环境的函数被激活,理解这些问题仍需要大量的工作。
在现实世界的环境中,集群机器人面对的主要挑战是适应意外事件的发生,例如,障碍物的存在及不断变化的大气条件(例如光照、风、降水)。所有这些事件都可能妨碍集群机器人前行或执行某些任务。在这些条件下,集群必须共同地调整其行为并自动改变其策略。这种群体能力可以在一些群居动物(成群的摇蚊、鱼、羊)中观察到。在这些物种中,个体之间的交互会导致一些集体属性,它们与两种宏观状态之间接近相变的物理系统的属性类似(术语见表1),这导致对少数个体的行为变化极为敏感[90, 91]。在这种条件下,少数察觉到环境变化的个体的反应可以传播到集群中的其他成员,使它们能够有效地应对捕食者的攻击等干扰。这种群体适应能力不仅源于个体之间特殊的交互形式,而且源于对这些互动相对强度的调节[92]。这类特性在集群机器人中的转换可以显著提高他们的自主水平,这将是一个很有前景的研究方向。
到目前为止,机器学习在集群机器人中唯一突出的应用就是进化算法(见表1中的术语表),用于开发简单的神经控制器来驱动集群中单个机器人的行为。然而,机器学习的最新进展,特别是新的深度学习技术的可用性,既可作为一种设计群体行为的手段,也可为在集体内共享的单个机器人提供额外的能力。目前为止,这些研究没有得到集群机器人社区的认可。机器学习作为一种设计方法,存在自动设计的问题[44],以及通过试错来进行在线学习的附加约束[93],以及情景奖励和协调问题。无模型方法(见表1)在计算条件方面可能非常苛刻,尽管它们在处理表征群体行为的复杂、不可预测的突发事件方面非常强大。由于学习(当前)群体行为的模型能够产生高效设计的个体政策,基于模型的方法可能会很有价值。两者的结合是目前几个领域一直在探索的方向,它可能也与集群机器人的研究有关。除了设计群体行为之外,机器学习以及更为特殊的深度学习方法可以为个体机器人提供先进的能力以维持个体和群体行为。从这方面看,找到可以利用集群所得的信息来支持更有效地解释世界的方法显得非常重要。例如,深度网络代表了图像分类的最先进技术,而图像分类则是许多与机器人集群相关应用中所需的一项功能。通过利用多个机器人从不同角度和不同时间下观察同一场景的存在性,可以提供更准确和更高计算效率的解决方案[94,95]。为了支持这种集群级别的操作,研究人员还需要大量工作来定义网络架构和学习范式。
在实验室外使用自主机器人会带来安全问题。机器人在执行任务时需要具备安全性[96],它们应该保证所收集数据的隐私,它们也应该能够抵御由恶意用户试图获得控制而发起的外部攻击。在机器人集群的情况下,这些问题将更加严重[97]。由于某些场景下可能存在数百个相互交互的机器人,诸如实体身份验证、数据机密性和数据完整性等问题会被放大。此外,少数恶意机器人潜入集群可能会导致集群的工作中断[97]。机器人集群安全的研究仍处于起步阶段。最初的工作是研究如何利用传统的(例如,加密的Merkle树[98])和不那么传统的(区块链[99])安全方法来增加安全层或被完全集成到机器人集群的控制体系结构中。这些初期的工作可以解决诸如如何在群中保持信息私有化[98][100],如何避免恶意机器人的干扰[101],以及如何对抗Sybil攻击[99]等问题。研究人员需要进行大量研究来扩展这些简单的、概念验证的解决方案,以便将它们移植到现实世界中的大群机器人中。
虽然与单个机器/机器人的交互已被深入研究[102],但与机器人集群的交互则开辟了全新的方向。主要的困难在于集群是自组织的,因此没有一个清晰的实体可以让人类与之建立交流。为了向集群提供关于要实现的目标或要完成的任务的信息[103][104],人类-集群交互(HSI)非常有必要。在集群中嵌入一些用户驱动的机器人,可以间接地控制集群。最近几个学科的研究[92][105][107]表明,少数忠诚代理可以决定集群的整体行为。类似的机制代表了控制机器人集群的有趣方法,尽管它们可能需要引入必要的安全挑战,以避免少数恶意机器人控制整个机器人集群。或者,机器人集群可以由用户直接控制或操纵,例如通过手势[108][109]或脑电图信号[110]进行控制。
用户对集群的直接控制是复杂的,因为理解集群在做什么是非常具有挑战性的,这是由于集群内部发生了大量的交互,这对于人类观察者来说可能很难“读懂”。因此,可解释性至关重要。可能的解决方案或许内置于集群的自组织机制中,以便使用户能够看到集群的当前状态和目标。群体行为的接口(可能通过增强现实来实现)可以收集和可视化来自集群的信息,而群体行为的模型可以被集成以提供支持用户采取行动的预测(例如,通过向集群发出新的命令)。任何HSI解决方案的设计都需要了解与机器人集群互动的人类所产生的心理影响,以支持减少压力的互动方式[111][112],并提高可用性和信任度[113]。
迄今为止对集群机器人研究的巨大兴趣[114-116]源于人们期待基于自主机器人的现实应用将在不久的将来无处不在,以及让它们彼此合作以及与人类用户合作来避免集中控制的陷阱。同时考虑到合作场景(即机器人协调完成共同任务)和半合作场景(例如,受益于全球高效活动组织的自利机器人,如自动驾驶汽车),集群机器人研究产生的知识和实践将是解决未来机器人应用中复杂协调问题的关键。因此,研究人员坚信,推进集群机器人研究不仅有利于该领域本身,而且很大程度上有利于机器人技术、信息物理系统和社会技术系统等领域。
在本节中,研究人员首先讨论了在现实应用中使用机器人集群来解决问题或执行任务的一般准测,然后概述了研究人员认为的集群机器人的主要潜在应用领域。本概述具有推测性,这是因为现实世界的应用程序还没有出现。然而,通过考虑不同的应用领域,并在其中批判性地评估集群机器人方法具体带来的好处,研究人员会有更多的选择。
原则上,当考虑将机器人集群应用于解决现实问题时,首要问题是机器人集群是否确实是最好的方法。然而,这是一个非常困难的问题,特别是考虑到集群机器人是一个年轻的学科,并且如上所述,该领域仍有许多未解决的研究问题。因此,当前的实践包括基于相对于其他解决方案的预期优势来评估集群机器人解决方案的适用性,并考虑可用技术施加的约束(一个值得注意的例外是Kazadi的工作[117,118],他明确解决了机器人集群是否是某给定问题的适当技术的问题; 然而他的方法仍处于提案阶段,并且尚未应用于任何真正的机器人集群实践)。由于缺乏从问题规范到机器人集群实现和部署的工作方法,下面研究人员将讨论一些在处理具体应用问题时指导选择集群机器人解决方案的普遍指导原则。
第一个非常普遍的指导方针是,只有当单个机器人解决方案无法(有效地)解决问题时,才应该考虑使用多机器人系统以及它的扩展——机器人集群,这是因为考虑到现有的技术和应用限制,这些系统要么太复杂,要么要求太高。例如,单个机器人对大面积区域的监控不太可行,唯一的选择可能是同时使用多个机器人[119]。另一个例子是在搜救场景中使用无人机探索一座大型倒塌建筑:即使在这种情况下,一架无人机也可能执行任务,但由于有限的飞行时间和需要飞回来充电,这可能不够有效。在这种情况下,多机器人解决方案通过并行操作[41]可以更加高效。
一旦建立了多机器人系统的适应性,研究人员就应该考虑哪种控制方法最适合所涉及的问题。例如,当以集中方式协调机器人不现实或不可取时[120],使用机器人集群可能是正确的方法。在某些情况下,集中式重规划可以解决任务的不确定性和环境的不可预测性[121]。然而,如果对在线识别功能和偶发事件适应性具有强烈需求,最好是通过去中心化的、自组织的方法来实现。然而,即使在这种情况下,应该考虑如果其他方法,如分布式模型预测控制[122, 123],可以用,这可能并非如此当它是不可能或很难创建简单模型要解决的问题和机器人的环境操作。然而,人们应该考虑是否可以使用其他方法(例如分布式模型预测控制[122, 123]),但当不可能或太难创建足够简单的模型来应对要解决的问题和机器人将要操作的环境时,那就要另当别论了。
另一个需要考虑的方面是,给定的问题是否可以分解为固定数量的具有明确定义的任务,这些任务可以由一组机器人完成,而且每个机器人都有特定的角色,例如装配线或机器人足球[68]。若非如此,那么集群机器人方法可能是可行的。换句话说,即使某个问题可以用多机器人系统更好地解决,这并不一定意味着需要一个机器人集群。如果任务在子任务中没有预定义的分区,或者该任务允许将不同的角色分配给可用的机器人[27,29],则该任务更适合后一种方案。最后,如果期望机器人之间进行有益的合作,集群机器人方法可能是正确的选择。事实上,集群机器人系统通过协作可以实现性能的超线性增长,从而证明建立协作所必需的开销是合理的[124]。
考虑到这些因素,研究人员应该对集群机器人的潜在应用领域进行严格评估,以确定集群机器人方法可以具体带来的效益。例如,虽然服务机器人通常不按照群体进行组织,但是每个机器人所执行的协调活动和任务分配在一定程度上是去中心化的和自组织的。尽管如此,特定任务本身可能不需要机器人之间的协调或协作。类似地,物流(如大型仓库)、自动驾驶汽车和智能移动肯定能从集群机器人研究的去中心化协调策略中获益。然而,这些应用不太可能指导未来的集群机器人研究。相反,精确农业或基础设施检查与维护等应用需要处理非结构化、不可预测的环境(通常覆盖的范围很广),它们可以从机器人集群的并行化和协作中获益。例如,早期识别农田内疾病的爆发需要机器人之间的信息共享,以便从耦合的局部视角中形成全局模式,支持适当的响应和更好的战略规划[95,125]。类似地,在大型基础设施中可靠地识别缺陷需要高效的搜索能力,而这种能力可以通过群集的方式最佳实现[126]。精确农业和基础设施检查都发生在某种静态环境中(农田或要检查的基础设施)。尽管如此,去中心化和自组织可以提高效率(归功于并行和协调的操作)和精度(归功于群体感知的自适应策略,它允许对感知到的偶发事件作出反应,并确定最优的任务计划,从而最大限度地提高所有相关特征被仔细观察的可能性)。在这方面,未来的研究应该聚焦于通过多种可能异构的机器人之间的信息融合来理解复杂特征的策略。此外,研究人员需要设计有针对性的干预和操作能力(例如收获果实或维护),为去中心化的合作活动提供新的机会。
全世界的国防机构都在寻求机器人集群的应用,并且发现无法被轻易关闭的系统非常吸引人[127]。对外部攻击具有容错能力的系统可以支持对抗性设置下的操作,特别是当机器人是可替换的,并且在某种程度上是可丢弃的。然而,在这方面,人的因素仍然不可避免地处于中心地位。因此,国防应用需要考虑人在环,而且先进的HSI战略将是有效部署的关键[113]。此外,安全和防护方面需要达到最高水平,以确保机器人集群不会失控或被恶意捕获[96]。类似的方面在民防等其他应用领域也很重要,这些领域需要面对自然或人为灾害,需要不依赖外部基础设施或可靠地图也能够处理紧急情况的敏捷机器人。这种类型的应用的门槛非常高,因为机器人集群需要保证最高的性能和可靠性,从而确保所有受害者都得到援救。
空间任务引入了机器人应用的其他限制,这些限制可能由集群机器人成功解决。在太空中,由于宇宙辐射对现代cpu的影响,计算机的计算能力仍然有限[128]。因此,与单个更强大的机器人相比,计算能力有限的机器人集群可能是更好的设计选择[69,129,130]。发射到太空中的机器人不容易修复或替换,致力于冗余系统的集群机器人会是一个很好的解决方案,集群中单个机器人的故障只会导致群性能的轻微下降。最后,在太空中,建立外部基础设施来支持机器人的协调可能是极其昂贵的,甚至是不可能的,这也是机器人集群可以有效处理的典型情形。因此,NASA和ESA等空间机构已经开始对集群技术产生了兴趣,例如前文提到的Swarmathon竞赛等活动[69]和针对微卫星群控制的研究[130]。群系统的必要自治是空间应用带来的巨大挑战,它要求不能依赖可靠和持续的人工干预。
机器人集群在娱乐行业也良好的发展潜力。目前已经有一些无人机在室外和室内进行灯光表演的例子[131],然而,这通常是基于集中预先安排的飞行路径。类似地,其他开发多机器人娱乐系统的尝试也依赖于一些集中控制的解决方案来精细地控制系统[132, 133]。如果考虑去中心化方法,特别是如果用户能够通过参与机器人集群而积极参与娱乐活动,并根据位置、运动甚至情感改变其动态,则可能会有新的机遇[134]。在这种情况下,未来研究可以试验HSI的全新模式,这之后也可以被其他应用领域借鉴。例如,研究人员可以想象各种HSI接口,从可穿戴设备[135],增强和虚拟现实[136]到脑机交互模式[110]。
最后,成群的纳米机器人可能在未来成为精确医学的高新工具,使人体内的靶向干预成为可能,如微创手术或直接向癌细胞传递的多疗法[137, 138]。然而,协调大量计算能力和通信能力极其有限的机器人将使集群机器人方法达到其极限,并需要开发新的概念工具,以及微观硬件或生物机器人设备[58]。
总体而言,集群机器人潜在应用领域的需求与未来研究挑战之间的关系是毋庸置疑的。因此,研究人员设想了研究人员和来自不同应用领域的利益相关者之间的密切合作,他们可以提供实例来推动新的发展,并为设定未来几年集群机器人的研究议程做出贡献。
设计和实现有效的机器人集群是机器人技术面临的最大挑战之一,也是最有前途的研究方向之一,这一说法已经得到了证实[116]。在这篇文章中,研究人员简要地总结了集群集群机器人技术的现状,并确定了研究人员认为最有前途的研究方向和主要的开放问题。然而,研究人员应该认为集群机器人技术的重大进步必然会在该领域之外取得进展。例如,新材料、生物混合解决方案以及储存和传输能量的新方法将有助于解决目前与机器人集群硬件相关的一些问题。人工智能技术的发展,特别仅需有限计算资源并能够与小型廉价机器人的cpu一起工作的分布式学习算法的发展,将使机器人群体逐渐增加其自主性。集群必须确保可解释性,这现在是整个机器人和人工智能领域的一个主要问题。换句话说,用户将需要能够在不详细了解底层机制的情况下理解决策过程——这是确保新智能技术的可接受性和培养对它们的信任的重要需求,从而为大规模的现实世界中的部署创造条件。尽管这些问题在人工智能领域得到了更广泛的解决,但它们的复杂性可能会因大量的自主实体和它们之间的大量交互而增加,而这恰恰是集群机器人系统的典型特征。
如果研究人员能够克服这些挑战,集群机器人预计将在十年内成功地从实验室进入到现实世界。这种转变不会立即发生,但将逐步涉及越来越多的应用领域,从而确定新的挑战以及创造对新兴技术解决方案的需求,从而推动未来几年的研究和创新。
[1] S. Camazine, J.-L. Deneubourg, N. R. Franks,J. Sneyd, G. Theraulaz, and E. Bonabeau, Self-Organization in Biological Systems. Princeton,NJ, USA: Princeton Univ. Press, 2001.
[2] D. J. T. Sumpter, Collective Animal Behavior.Princeton, NJ, USA: Princeton Univ. Press, 2010.
[3] E. Bonabeau, M. Dorigo, and G. Theraulaz, Swarm Intelligence: From Natural to Artificial Systems. New York, NY, USA: Oxford Univ. Press, 1999.
[4] M. Dorigo and M. Birattari, “Swarm intelligence,” Scholarpedia, vol. 2, no. 9, p. 1462, 2007.
[5] M. Dorigo, “Ant colony optimization,” Scholarpedia, vol. 2, no. 3, p. 1461, 2007.
[6] M. Dorigo,M. A. M. de Oca, and A. P. Engelbrecht, “Particle swarm optimization,” Scholarpedia, vol. 3, no. 11, p. 1486, 2008.
[7] G. Di Caro and M. Dorigo, “AntNet: Distributed stigmergetic control for communications networks,” J. Artif. Intell. Res., vol. 9, pp. 317–365, Dec. 1998.
[8] M. Moussaïd, D. Helbing, and G. Theraulaz, “How simple rules determine pedestrian behavior and crowd disasters,” Proc. Nat. Acad. Sci. USA, vol. 108, no. 17, pp. 6884–6888, 2011. [Online]. Available: https://www.pnas.org/content/108/17/6884
[9] R. Beckers, O. E. Holland, and J. L. Deneubourg,“From local actions to global tasks: Stigmergy and collective robotics,” in Proc. 4th Int. Workshop Synthesis Simulation Living Syst. Artif. Life IV, R. A. Brooks and P. Maes, Eds. Cambridge, MA, USA:MIT Press, 1994, pp. 181–189.
[10] O. Holland and C. Melhuish, “Stigmergy, self-organization, and sorting in collective
robotics,” Artif. Life, vol. 5, no. 2, pp. 173–202,Apr. 1999.
[11] C. R. Kube and H. Zhang, “Collective robotics:From social insects to robots,” Adapt. Behav.,vol. 2, no. 2, pp. 189–218, Sep. 1993.
[12] C. Kube and E. Bonabeau, “Cooperative transport by ants and robots,” Robot. Auton. Syst., vol. 30,no. 1, pp. 85–101, 2000. [Online]. Available:http://www.sciencedirect.com/science/article/pii/S0921889099000664
[13] M. J. B. Krieger, J.-B. Billeter, and L. Keller,“Ant-like task allocation and recruitment in cooperative robots,” Nature, vol. 406, no. 6799,pp. 992–995, Aug. 2000.
[14] A. J. Ijspeert, A. Martinoli, A. Billard, and L. M. Gambardella, “Collaboration through the exploitation of local interactions in autonomous collective robotics: The stick pulling experiment,” Autonom. Robots, vol. 11, no. 2, pp. 149–171,2001.
[15] W. Agassounon, A. Martinoli, and K. Easton,“Macroscopic modeling of aggregation
experiments using embodied agents in teams of constant and time-varying sizes,” Auton. Robots,vol. 17, nos. 2–3, pp. 163–192, Sep. 2004.
[16] M.Wilson, C. Melhuish, A. B. Sendova-Franks, and S. Scholes, “Algorithms for building annular structures with minimalist robots inspired by brood sorting in ant colonies,” Auton. Robots, vol. 17, nos. 2–3, pp. 115–136, Sep. 2004.
[17] S. Garnier et al., “The embodiment of cockroach aggregation behavior in a group of micro-robots,”Artif. Life, vol. 14, no. 4, pp. 387–408, Oct. 2008.
[18] J. Halloy et al., “Social integration of robots into groups of cockroaches to control self-organized choices,” Science, vol. 318, no. 5853, pp. 1155–1158, 2007. [Online]. Available:https://science.sciencemag.org/content/318/5853/1155
[19] S. Garnier, M. Combe, C. Jost, and G. Theraulaz,“Do ants need to estimate the geometrical properties of trail bifurcations to find an efficient route? A swarm robotics test bed,” PLoS Comput. Biol., vol. 9, no. 3, Mar. 2013, Art. no. e1002903.
[20] A. Reina, G. Valentini, C. Fernández-Oto,M. Dorigo, and V. Trianni, “A design pattern for decentralised decision making,” PLoS ONE, vol. 10, no. 10, Oct. 2015, Art. no. e0140950.
[21] G. Valentini, Achieving Consensus in Robot Swarms: Design and Analysis of Strategies for the Best-of-n Problem (Studies in Computational Intelligence). Cham, Switzerland: Springer, 2017.
[22] P.-P. Grassé, “La reconstruction du nid et lescoordinations interindividuelles chez
Bellicositermes natalensis et Cubitermes sp. La théorie de la stigmergie: Essai d’interprétation du comportement des termites constructeurs,”Insectes Sociaux, vol. 6, no. 1, pp. 41–80,Mar. 1959.
[23] G. Theraulaz and E. Bonabeau, “A brief history of stigmergy,” Artif. Life, vol. 5, no. 2, pp. 97–116, 1999, doi: 10.1162/106454699568700.
[24] S. Garnier, J. Gautrais, and G. Theraulaz,“The biological principles of swarm intelligence,”Swarm Intell., vol. 1, no. 1, pp. 3–31, Oct. 2007.
[25] M. Dorigo et al., “Evolving self-organizing behaviors for a swarm-bot,” Auton. Robots,vol. 17, nos. 2–3, pp. 223–245, Sep. 2004.
[26] F. Mondada, L. M. Gambardella, D. FloreanoS. Nolfi, J. Deneubourg, and M. Dorigo,
“The cooperation of swarm-bots–physical interactions in collective robotics,” IEEE Robot.
Autom. Mag., vol. 12, no. 2, pp. 21–28, Jun. 2005.
[27] S. Nouyan, R. Groß,M. Bonani, F.Mondada, and M. Dorigo, “Teamwork in self-organized robot colonies,” IEEE Trans. Evol. Comput., vol. 13, no. 4, pp. 695–711, Aug. 2009.
[28] M. Dorigo, M. Birattari, and R. O’Grady, “Swarmanoid, the movie,” in Proc. AAAI-11 Video,2011. [Online]. Available: http://www.youtube.com/watch?v=M2nn1X9Xlps
[29] M. Dorigo et al., “Swarmanoid: A novel concept for the study of heterogeneous robotic swarms,”IEEE Robot. Autom. Mag., vol. 20, no. 4,pp. 60–71, Dec. 2013.
[30] M. Rubenstein, C. Ahler, N. Hoff, A. Cabrera, and R. Nagpal, “Kilobot: A low cost robot with scalable operations designed for collective behaviors,” Robot. Auton. Syst., vol. 62, no. 7, pp. 966–975,2014, reconfigurable Modular Robotics. [Online]. Available: http://www.sciencedirect.com/science/article/pii/S0921889013001474
[31] M. Rubenstein, A. Cornejo and R. Nagpal, “Programmable self-assembly in a thousand-robot swarm”, Science, vol. 345, no. 6198, pp. 795-799, 2014, [online] Available: https://science.sciencemag.org/content/345/6198/795.
[32] G. Valentini, E. Ferrante, H. Hamann and M. Dorigo, “Collective decision with 100 kilobots: Speed versus accuracy in binary discrimination problems”, Auton. Agents Multi-Agent Syst., vol. 30, no. 3, pp. 553-580, May 2016.
[33] I. Slavkov et al., “Morphogenesis in robot swarms,” Sci. Robot., vol. 3, no. 25, 2018, Art. no. eaau9178. [Online]. Available: https:// robotics.sciencemag.org/content/3/25/eaau9178
[34] M. S. Talamali, T. Bose, M. Haire, X. Xu, J. A. R. Marshall, and A. Reina, “Sophisticated collective foraging with minimalist agents: A swarm robotics test,” Swarm Intell., vol. 14, no. 1, pp. 25–56, Mar. 2020.
[35] S. Kornienko, O. Kornienko, and P. Levi, “Minimalistic approach towards communication and perception in microrobotic swarms,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Aug. 2005, pp. 2228–2234.
[36] G. Caprari and R. Siegwart, “Mobile micro-robots ready to use: Alice,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Aug.2005, pp. 3295–3300.
[37] F. Mondada et al., “The e-puck, a robot designed for education in engineering,” in Proc. 9th Conf. Auton. Robot Syst. Competitions, 2009, pp. 59–65.
[38] M. Duarte et al., “Evolution of collective behaviors for a real swarm of aquatic surface robots,” PLoS ONE, vol. 11, no. 3, Mar. 2016, Art. no. e0151834.
[39] P. Zahadat and T. Schmickl, “Division of labor in a swarm of autonomous underwater robots by improved partitioning social inhibition,” Adapt. Behav., vol. 24, no. 2, pp. 87–101, Apr. 2016.
[40] G. Vásárhelyi, C. Virágh, G. Somorjai, T. Nepusz, A. E. Eiben, and T. Vicsek, “Optimized flocking of autonomous drones in confined environments,” Sci. Robot., vol. 3, no. 20, 2018, Art. no. eaat3536. [Online]. Available: https://robotics.sciencemag. org/content/3/20/eaat3536
[41] K. N. McGuire, C. De Wagter, K. Tuyls, H. J. Kappen, and G. C. H. E. de Croon, “Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment,” Sci. Robot., vol. 4, no. 35, 2019, Art. no. eaaw9710. [Online]. Available: https://robotics. sciencemag.org/content/4/35/eaaw9710
[42] M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: A review from the swarm engineering perspective,” Swarm Intell., vol. 7, no. 1, pp. 1–41, Mar. 2013.
[43] V. Trianni and A. Campo, “Fundamental collective behaviors in swarm robotics,” in Springer Handbook of Computational Intelligence, J. Kacprzyk and W. Pedrycz, Eds. Berlin, Germany: Springer, 2015, pp. 1377–1394, doi: 10.1007/978-3-662-43505-2_71. [44] G. Francesca and M. Birattari, “Automatic design of robot swarms: Achievements and challenges,” Frontiers Robot. AI, vol. 3, p. 29, Mar. 2016. [Online]. Available: https://www.frontiersin. org/article/10.3389/frobt.2016.00029
[45] L. Garattoni and M. Birattari, “Swarm robotics,” in Wiley Encyclopedia of Electrical and Electronics Engineering, J. G. Webster, Ed. 2016, 10.1002/047134608X.W8312.
[46] G. Valentini, E. Ferrante and M. Dorigo, “The best-of-n problem in robot swarms: Formalization state of the art and novel perspectives”, Frontiers Robot. AI, vol. 4, Mar. 2017.
[47] M. Massink, M. Brambilla, D. Latella, M. Dorigo, and M. Birattari, “On the use of bio-PEPA for modelling and analysing collective behaviours in swarm robotics,” Swarm Intell., vol. 7, nos. 2–3, pp. 201–228, Sep. 2013.
[48] A. Prorok, N. Correll, and A. Martinoli, “Multi-level spatial modeling for stochastic distributed robotic systems,” Int. J. Robot. Res., vol. 30, no. 5, pp. 574–589, Apr. 2011.
[49] K. Elamvazhuthi and S. Berman, “Mean-field models in swarm robotics: A survey,” Bioinspiration Biomimetics, vol. 15, no. 1, 2019, Art. no. 015001, doi: 10.1088/1748-3190/ab49a4.
[50] V. Trianni, “Evolutionary swarm robotics,” in Evolving Self-Organising Behaviours in Groups of Autonomous Robots (Studies in Computational Intelligence), vol. 108. Berlin, Germany: Springer-Verlag, 2008.
[51] M. Gauci, J. Chen, W. Li, T. J. Dodd, and R. Groß, “Self-organized aggregation without computation,” Int. J. Robot. Res., vol. 33, no. 8, pp. 1145–1161, 2014.
[52] A. Ozdemir, M. Gauci, S. Bonnet, and R. Groß, “Finding consensus without computation,” IEEE Robot. Autom. Lett., vol. 3, no. 3, pp. 1346–1353, Jul. 2018.
[53] G. Francesca et al., “AutoMoDe-chocolate: Automatic design of control software for robot swarms,” Swarm Intell., vol. 9, nos. 2–3, pp. 125–152, Sep. 2015.
[54] E. Ferrante, A. E. Turgut, E. Duéñez-Guzmán, M. Dorigo, and T. Wenseleers, “Evolution of self-organized task specialization in robot swarms,” PLOS Comput. Biol., vol. 11, no. 8, Aug. 2015, Art. no. e1004273.
[55] M. Brambilla, A. Brutschy, M. Dorigo, and M. Birattari, “Property-driven design for robot swarms: A design method based on prescriptive modeling and model checking,” ACM Trans. Auton. Adapt. Syst., vol. 9, no. 4, pp. 17:1–17:28, 2015.
[56] J. Werfel, K. Petersen, and R. Nagpa, “Designing collective behavior in a termite-inspired robot construction team,” Science, vol. 343, no. 6172, pp. 754–758, 2014. [Online]. Available: https:// science.sciencemag.org/content/343/6172/754
[57] S. Garnier, J. Gautrais, M. Asadpour, C. Jost, and G. Theraulaz, “Self-organized aggregation triggers collective decision making in a group of cockroach-like robots,” Adapt. Behav., vol. 17, no. 2, pp. 109–133, Apr. 2009.
[58] M. Sitti, Mobile Microrobotics. Cambridge, MA, USA: MIT Press, 2017.
[59] A. Reina, A. J. Cope, E. Nikolaidis, J. A. R. Marshall, and C. Sabo, “ARK: Augmented reality for kilobots,” IEEE Robot. Autom. Lett., vol. 2, no. 3, pp. 1755–1761, Jul. 2017.
[60] G. Valentini et al., “Kilogrid: A novel experimental environment for the Kilobot robot,” Swarm Intell., vol. 12, no. 3, pp. 245–266, Sep. 2018.
[61] W. Giernacki, M. Skwierczy´nski, W. Witwicki, P. Wro´nski, and P. Kozierski, “Crazyflie 2.0 quadrotor as a platform for research and education in robotics and control engineering,” in Proc. 22nd Int. Conf. Methods Models Autom. Robot. (MMAR), Aug. 2017, pp. 37–42.
[62] N. Jacobi, P. Husbands, and I. Harvey, “Noise and the reality gap: The use of simulation in evolutionary robotics,” in Proc. 3rd Eur. Conf. Adv. Artif. Life. Berlin, Germany: Springer-Verlag, 1995, pp. 704–720.
[63] C. Pinciroli et al., “ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems,” Swarm Intell., vol. 6, no. 4, pp. 271–295, Dec. 2012.
[64] Y. Song, S. Naji, E. Kaufmann, A. Loquercio, and D. Scaramuzza, “Flightmare: A flexible quadrotor simulator,” 2020, arXiv:2009.00563. [Online]. Available: https://arxiv.org/abs/2009.00563
[65] M. Birattari et al., “Automatic off-line design of robot swarms: A manifesto,” Frontiers Robot. AI, vol. 6, p. 59, Jul. 2019.
[66] B. P. Gerkey and M. J. Matari´c, “A formal analysis and taxonomy of task allocation in multi-robot systems,” Int. J. Robot. Res., vol. 23, no. 9, pp. 939–954, Sep. 2004.
[67] E. Nunes, M. Manner, H. Mitiche, and M. Gini, “A taxonomy for task allocation problems with temporal and ordering constraints,” Robot. Auton. Syst., vol. 90, pp. 55–70, Apr. 2017. [Online]. Available: http://www.sciencedirect. com/science/article/pii/S0921889016306157
[68] S. R. Hedberg, “Robots playing soccer? RoboCup poses a new set of challenges in intelligent distributed computing,” IEEE Concurrency, vol. 5, no. 4, pp. 13–17, Oct. 1997.
[69] L. A. Nguyen, T. L. Harman, and C. Fairchild, “Swarmathon: A swarm robotics experiment for future space exploration,” in Proc. IEEE Int. Symp. Meas. Control Robot. (ISMCR), Sep. 2019, pp. B1-3-1–B1-3-4.
[70] H. Hamann and H. Wörn, “A framework of space–time continuous models for algorithm design in swarm robotics,” Swarm Intell., vol. 2, nos. 2–4, pp. 209–239, Dec. 2008.
[71] T. Vicsek and A. Zafeiris, “Collective motion,” Phys. Rep., vol. 517, nos. 3–4, pp. 71–140, Aug. 2012.
[72] M. Coppola, J. Guo, E. Gill, and G. C. H. E. de Croon, “Provable self-organizing pattern formation by a swarm of robots with limited knowledge,” Swarm Intell., vol. 13, no. 1, pp. 59–94, Mar. 2019.
[73] L. Lei, R. Escobedo, C. Sire, and G. Theraulaz, “Computational and robotic modeling reveal parsimonious combinations of interactions between individuals in schooling fish,” PLOS Comput. Biol., vol. 16, no. 3, Mar. 2020, Art. no. e1007194.
[74] J. Krause, A. F. Winfield, and J.-L. Deneubourg, “Interactive robots in experimental biology,” Trends Ecol. Evol., vol. 26, no. 7, pp. 369–375, 2011. [Online]. Available: http://www. sciencedirect.com/science/article/pii/S016953 4711000851
[75] S. Mitri, S. Wischmann, D. Floreano, and L. Keller, “Using robots to understand social behaviour,” Biol. Rev., vol. 88, no. 1, pp. 31–39, 2013, doi: 10.1111/j.1469-185X.2012.00236.x.
[76] F. Bonnet et al., “Robots mediating interactions between animals for interspecies collective behaviors,” Sci. Robot., vol. 4, no. 28, 2019, Art. no. eaau7897. [Online]. Available: https:// robotics.sciencemag.org/content/4/28/eaau7897
[77] H. Xie et al., “Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation,” Sci. Robot., vol. 4, no. 28, 2019, Art. no. eaav8006. [Online]. Available: https://robotics.sciencemag.org/content/4/28/ eaav8006
[78] S. Kriegman, D. Blackiston, M. Levin, and J. Bongard, “A scalable pipeline for designing reconfigurable organisms,” Proc. Nat. Acad. Sci. USA, vol. 117, no. 4, pp. 1853–1859, 2020. [Online]. Available: https://www.pnas. org/content/117/4/1853
[79] R. D. Leonardo et al., “Bacterial ratchet motors,” Proc. Nat. Acad. Sci. USA, vol. 107, no. 21, pp. 9541–9545, May 2010. [Online]. Available: https://www.pnas.org/content/107/21/9541
[80] K. E. Peyer, L. Zhang, and B. J. Nelson, “Bio-inspired magnetic swimming microrobots for biomedical applications,” Nanoscale, vol. 5, no. 4, pp. 1259–1272, 2012. [Online]. Available: http://dx.doi.org/10.1039/C2NR32554C
[81] I. Rabinowitch, M. Chatzigeorgiou, B. Zhao, M. Treinin, and W. R. Schafer, “Rewiring neural circuits by the insertion of ectopic electrical synapses in transgenic C. elegans,” Nature Commun., vol. 5, no. 1, 2014, Art. no. 4442. [Online]. Available: https://app.dimensions.ai/ details/publication/pub.1050134945 and https://www.ncbi.nlm.nih.gov/pmc/articles/ PMC4109004
[82] M. Z. Miskin et al., “Electronically integrated, mass-manufactured, microscopic robots,” Nature, vol. 584, no. 7822, pp. 557–561, Aug. 2020.
[83] N. Kumar, H. Soni, S. Ramaswamy, and A. K. Sood, “Flocking at a distance in active granular matter,” Nature Commun., vol. 5, no. 1, p. 4688, Dec. 2014.
[84] M. Bär, R. Großmann, S. Heidenreich, and F. Peruani, “Self-propelled rods: Insights and perspectives for active matter,” Annu. Rev. Condens. Matter Phys., vol. 11, no. 1, pp. 441–466, Mar. 2020.
[85] R. Jeanson and A. Weidenmüller, “Interindividual variability in social insects–proximate causes and ultimate consequences,” Biol. Rev., vol. 89, no. 3, pp. 671–687, 2014. [Online]. Available: https:// onlinelibrary.wiley.com/doi/abs/10.1111/brv.12074
[86] I. D. Chase, “Social process and hierarchy formation in small groups: A comparative perspective,” Amer. Sociol. Rev., vol. 45, no. 6, pp. 905–924, 1980. [Online]. Available: http://www.jstor.org/stable/2094909
[87] G. Theraulaz, E. Bonabeau, and J.-L. Deneubourg, “Self-organization of hierarchies in animal societies: The case of the primitively eusocial wasp Polistes dominulus Christ,” J. Theor. Biol., vol. 174, no. 3, pp. 313–323, 1995. [Online]. Available: http://www.sciencedirect.com/ science/article/pii/S0022519385701014
[88] N. Mathews, A. L. Christensen, R. O’Grady, F. Mondada, and M. Dorigo, “Mergeable nervous systems for robots,” Nature Commun., vol. 8, no. 1, p. 439, Dec. 2017.
[89] W. Zhu, M. Allwright, M. K. Heinrich, S. O˘guz, A. L. Christensen, and M. Dorigo, “Formation control of UAVs and mobile robots using self-organized communication topologies,” in Proc. 12th Int. Conf. Swarm Intell. (ANTS) (Lecture Notes in Computer Science), vol. 12421. Berlin, Germany: Springer, 2020, pp. 306–314.
[90] A. Attanasi et al., “Finite-size scaling as a way to probe near-criticality in natural swarms,” Phys. Rev. Lett., vol. 113, Dec. 2014, Art. no. 238102, doi: 10.1103/PhysRevLett.113.238102.
[91] M. A. Muñoz, “Colloquium: Criticality and dynamical scaling in living systems,” Rev. Mod. Phys., vol. 90, Jul. 2018, Art. no. 031001, doi: 10.1103/RevModPhys.90.031001.
[92] D. S. Calovi, U. Lopez, P. Schuhmacher, H. Chaté, C. Sire, and G. Theraulaz, “Collective response to perturbations in a data-driven fish school model,” J. Roy. Soc. Interface, vol. 12, no. 104, 2015, Art. no. 20141362. [Online]. Available: https://royalsocietypublishing.org/doi/abs/ 10.1098/rsif.2014.1362
[93] L. Busoniu, R. Babuska, and B. De Schutter, “A comprehensive survey of multiagent reinforcement learning,” IEEE Trans. Syst., Man, Cybern. C, Appl. Rev., vol. 38, no. 2, pp. 156–172, Mar. 2008.
[94] E. Price et al., “Deep neural network-based cooperative visual tracking through multiple micro aerial vehicles,” IEEE Robot. Autom. Lett., vol. 3, no. 4, pp. 3193–3200, Oct. 2018.
[95] F. Magistri, D. Nardi, and V. Trianni, “Using prior information to improve crop/weed classification by MAV swarms,” in Proc. 11th Int. Micro Air Vehicle Competition Conf., Madrid, Spain, 2019, pp. 67–75.
[96] E. R. Hunt and S. Hauert, “A checklist for safe robot swarms,” Nature Mach. Intell., vol. 2, no. 8, pp. 420–422, Aug. 2020.
[97] F. Higgins, A. Tomlinson, and K. M. Martin, “Survey on security challenges for swarm robotics,” in Proc. 5th Int. Conf. Auton. Auton. Syst., 2009, pp. 307–312.
[98] E. C. Ferrer, T. Hardjono, M. Dorigo, and A. S. Pentland, “Secure and secret cooperation in robotic swarms,” 2019, arXiv:1904.09266. [Online]. Available: https://arxiv.org/abs/ 1904.09266
[99] V. Strobel, E. C. Ferrer, and M. Dorigo, “Blockchain technology secures robot swarms: A comparison of consensus protocols and their resilience to Byzantine robots,” Frontiers Robot. AI, vol. 7, p. 54, May 2020.
[100] A. Prorok and V. Kumar, “Towards differentially private aggregation of heterogeneous robots,” in Proc. 13th Int. Symp. Distrib. Auton. Robotic Syst., R. Groß, A. Kolling, S. Berman, E. Frazzoli, A. Martinoli, F. Matsuno, and M. Gauci, Eds. Cham, Switzerland: Springer, 2018, pp. 587–601, doi: 10.1007/978-3-319-73008-0_41
[101] V. Strobel, E. C. Ferrer, and M. Dorigo, “Managing Byzantine robots via blockchain technology in a swarm robotics collective decision making scenario,” in Proc. 17th Int. Conf. Auton. Agents Multiagent Syst. (AAMAS), M. Dastani, G. Sukthankar, E. André, and S. Koenig, Eds. Richland, SC, USA: International Foundation for Autonomous Agents and Multiagent Systems, 2018, pp. 541–549.
[102] C. Bartneck, T. Belpaeme, F. Eyssel, T. Kanda, M. Keijsers, and S. Šabanovi´c, Human-Robot Interaction: An Introduction. Cambridge, U.K.: Cambridge Univ. Press, 2020.
[103] D. S. Brown, M. A. Goodrich, S.-Y. Jung, and S. C. Kerman, “Two invariants of human swarm interaction,” J. Human-Robot Interact., vol. 5, no. 1, pp. 1–31, Aug. 2015.
[104] A. Kolling, P. Walker, N. Chakraborty, K. Sycara, and M. Lewis, “Human interaction with robot swarms: A survey,” IEEE Trans. Human-Mach. Syst., vol. 46, no. 1, pp. 9–26, Feb. 2016.
[105] J. Gautrais, C. Jost, R. Jeanson, and G. Theraulaz, “How individual interactions control aggregation patterns in gregarious arthropods,” Interact. Stud., vol. 5, no. 2, pp. 245–269, 2004. [Online]. Available: https://www.jbe-platform.com/ content/journals/10.1075/is.5.2.05gau
[106] I. D. Couzin, J. Krause, N. R. Franks, and S. A. Levin, “Effective leadership and decision-making in animal groups on the move,” Nature, vol. 433, no. 7025, pp. 513–516, Feb. 2005.
[107] A. Baronchelli, “The emergence of consensus: A primer,” Roy. Soc. Open Sci., vol. 5, no. 2, Feb. 2018, Art. no. 172189.
[108] G. Podevijn, R. O’Grady, Y. S. G. Nashed, and M. Dorigo, “Gesturing at subswarms: Towards direct human control of robot swarms,” in Proc. 14th Annu. Conf. Towards Auton. Robotic Syst. (TAROS) (Lecture Notes in Computer Science), vol. 8069, A. Natraj, S. Cameron, C. Melhuish, and M. Witkowski, Eds., 2013, pp. 390–403.
[109] J. Nagi, A. Giusti, L. M. Gambardella, and G. A. Di Caro, “Human-swarm interaction using spatial gestures,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., Sep. 2014, pp. 3834–3841.
[110] L. Mondada, M. E. Karim, and F. Mondada, “Electroencephalography as implicit communication channel for proximal interaction between humans and robot swarms,” Swarm Intell., vol. 10, no. 4, pp. 247–265, Dec. 2016.
[111] G. Podevijn, R. O’Grady, N. Mathews, A. Gilles, C. Fantini-Hauwel, and M. Dorigo, “Investigating the effect of increasing robot group sizes on the human psychophysiological state in the context of human–swarm interaction,” Swarm Intell., vol. 10, no. 3, pp. 193–210, Sep. 2016.
[112] G. Podevijn, R. O’Grady, C. Fantini-Hauwel, and M. Dorigo, “Human responses to stimuli produced by robot swarms—The effect of the reality-gap on psychological state,” in Proc. 13th Int. Symp. Distrib. Auto. Robotic Syst. (Springer Proceedings in Advanced Robotics), vol. 6, R. Groß, A. Kolling, S. Berman, E. Frazzoli, A. Martinoli, F. Matsuno, and M. Gauci, Eds. Cham, Switzerland: Springer, 2018, pp. 531–543.
[113] C. Nam, P. Walker, H. Li, M. Lewis, and K. Sycara, “Models of trust in human control of swarms with varied levels of autonomy,” IEEE Trans. HumanMach. Syst., vol. 50, no. 3, pp. 194–204,Jun.2020.
[114] M. Dorigo, G. Theraulaz, and V. Trianni, “Reflections on the future of swarm robotics,” Sci. Robot., vol. 5, no. 49, Dec. 2020, Art. no. eabe4385.
[115] M. Dorigo and E. Sahin, Eds., “Special issue on swarm robotics,” Auton. Robots, vol. 17, nos. 2–3, pp. 111–246, Sep. 2004.
[116] G.-Z. Yang et al., “The grand challenges of science robotics,” Sci. Robot., vol. 3, no. 14, 2018, Art. no. eaar7650. [Online]. Available: https:// robotics.sciencemag.org/content/3/14/eaar7650
[117] S. Kazadi, “Swarm engineering,” Ph.D. dissertation, California Inst. Technol., Pasadena, CA, USA, 2000.
[118] M. Li et al., “Generating swarm solution classes using the Hamiltonian method of swarm design,” in Proc. 9th Int. Conf. Agents Artif. Intell., vol. 2. Setúbal, Portugal: SciTePress, 2017, pp. 145–152.
[119] A. Renzaglia, L. Doitsidis, A. Martinelli, and E. B. Kosmatopoulos, “Multi-robot three-dimensional coverage of unknown areas,” Int. J. Robot. Res., vol. 31, no. 6, pp. 738–752, May 2012.
[120] W. Hönig, J. A. Preiss, T. K. S. Kumar, G. S. Sukhatme, and N. Ayanian, “Trajectory planning for quadrotor swarms,” IEEE Trans. Robot., vol. 34, no. 4, pp. 856–869, Aug. 2018.
[121] W. Hönig, S. Kiesel, A. Tinka, J. W. Durham, and N. Ayanian, “Persistent and robust execution of MAPF schedules in warehouses,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 1125–1131, Apr. 2019.
[122] R. R. Negenborn and J. M. Maestre, “Distributed model predictive control: An overview and roadmap of future research opportunities,” IEEE Control Syst., vol. 34, no. 4, pp. 87–97, Aug. 2014.
[123] C. E. Luis, M. Vukosavljev, and A. P. Schoellig, “Online trajectory generation with distributed model predictive control for multi-robot motion planning,” IEEE Robot. Autom. Lett., vol. 5, no. 2, pp. 604–611, Apr. 2020.
[124] H. Hamann and A. Reina, “Scalability in computing and robotics,” 2020, arXiv:2006.04969. [Online]. Available: http://arxiv.org/abs/2006.04969
[125] D. Albani, T. Manoni, D. Nardi, and V. Trianni, “Dynamic UAV swarm deployment for non-uniform coverage,” in Proc. 17th Int. Conf. Auton. Agents MultiAgent Syst. (AAMAS), 2018, pp. 523–531.
[126] N. Correll and A. Martinoli, “Multirobot inspection of industrial machinery,” IEEE Robot. Autom. Mag., vol. 16, no. 1, pp. 103–112, Mar. 2009.
[127] J. J. Dawkins, F. L. Crabbe, and D. Evangelista, “Deployment and flight operations of a large scale UAS combat swarm: Results from DARPA service academies swarm challenge,” in Proc. Int. Conf. Unmanned Aircr. Syst. (ICUAS), Jun. 2018, pp. 1271–1278.
[128] G. C. Messenger, “Radiation hardening,” in AccessScience. McGraw-Hill, 2020. [Online]. Available: https://www.accessscience.com/ content/566850
[129] T. M. Roehr, F. Cordes, and F. Kirchner, “Reconfigurable integrated multirobot exploration system (RIMRES): Heterogeneous modular reconfigurable robots for space exploration,” J. Field Robot., vol. 31, no. 1, pp. 3–34, 2014. [Online]. Available: https://onlinelibrary.wiley. com/doi/abs/10.1002/rob.21477
[130] C. Pinciroli et al., “Self-organizing and scalable shape formation for a swarm of pico satellites,” in Proc. NASA/ESA Conf. Adapt. Hardw. Syst., Los Alamitos, CA, USA: IEEE Computer Society Press, Jun. 2008, pp. 57–61.
[131] M. Waibel, B. Keays, and F. Augugliaro, “Drones shows: Creative potential and best practices,” Verity Studios, Zurich, Switzerland, White Paper, Jan. 2017.
[132] J. Alonso-Mora, A. Breitenmoser, M. Rufli, R. Siegwart, and P. Beardsley, “Image and animation display with multiple mobile robots,” Int. J. Robot. Res., vol. 31, no. 6, pp. 753–773, May 2012.
[133] M. Le Goc, L. H. Kim, A. Parsaei, J.-D. Fekete, P. Dragicevic, and S. Follmer, “Zooids: Building blocks for swarm user interfaces,” in Proc. 29th Annu. Symp. User Interface Softw. Technol. New York, NY, USA: Association for Computing Machinery, Oct. 2016, p. 97.
[134] M. Alhafnawi, S. Hauert, and P. O’Dowd, “Robotic canvas: Interactive painting onto robot swarms,” in Proc. Conf. Artif. Life, 2020, pp. 163–170.
[135] E. Tsykunov, R. Agishev, R. Ibrahimov, L. Labazanova, A. Tleugazy, and D. Tsetserukou, “SwarmTouch: Guiding a swarm of micro-quadrotors with impedance control using a wearable tactile interface,” IEEE Trans. Haptics, vol. 12, no. 3, pp. 363–374, Jul. 2019.
[136] W. Hönig, C. Milanes, L. Scaria, T. Phan, M. Bolas, and N. Ayanian, “Mixed reality for robotics,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), Sep. 2015, pp. 5382–5387.
[137] S. Jeon et al., “Magnetically actuated microrobots as a platform for stem cell transplantation,” Sci. Robot., vol. 4, no. 30, May 2019, Art. no. eaav4317.
[138] X. Dong and M. Sitti, “Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms,” Int. J. Robot. Res., vol. 39, no. 5, 2020, Art. no. 027836492090310.
原文链接:
https://ieeexplore.ieee.org/abstract/document/9460560
集智斑图顶刊论文速递栏目上线以来,持续收录来自Nature、Science等顶刊的最新论文,追踪复杂系统、网络科学、计算社会科学等领域的前沿进展。现在正式推出订阅功能,每周通过微信服务号「集智斑图」推送论文信息。扫描下方二维码即可一键订阅:

点击“阅读原文”,追踪复杂科学顶刊论文