Science Robotics速递:使用固态和液态集体状态的自组织机器人聚合体

关键词:模块化,弹性机器人系统,聚合体,自组织


论文题目:A self-organizing robotic aggregate using solid and liquid-like collective states 论文期刊:Science Robotics 论文地址:https://www.science.org/doi/10.1126/scirobotics.adh4130
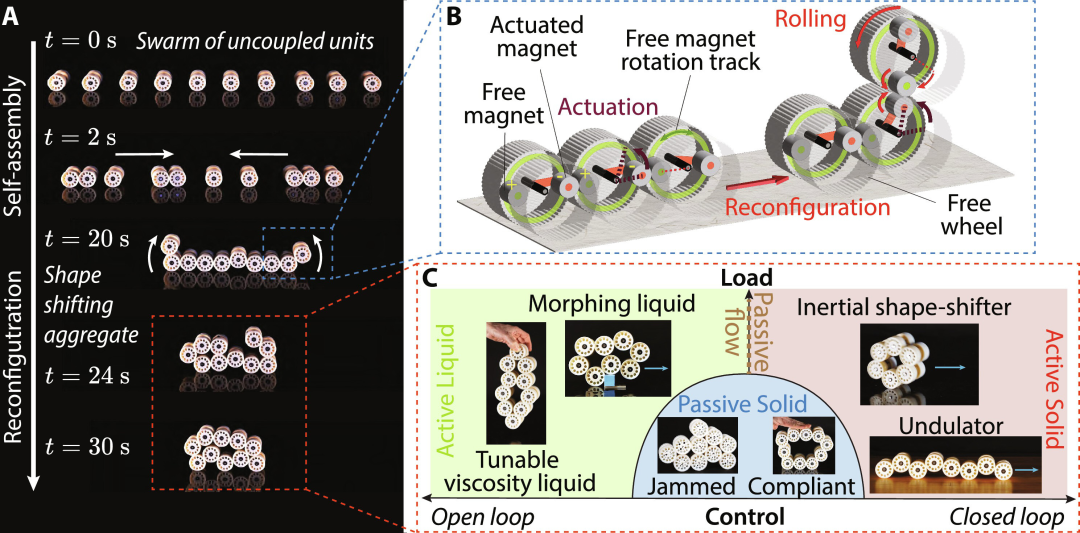
图1. 模块化系统 Granulobot 连接软体机器人和活性颗粒材料
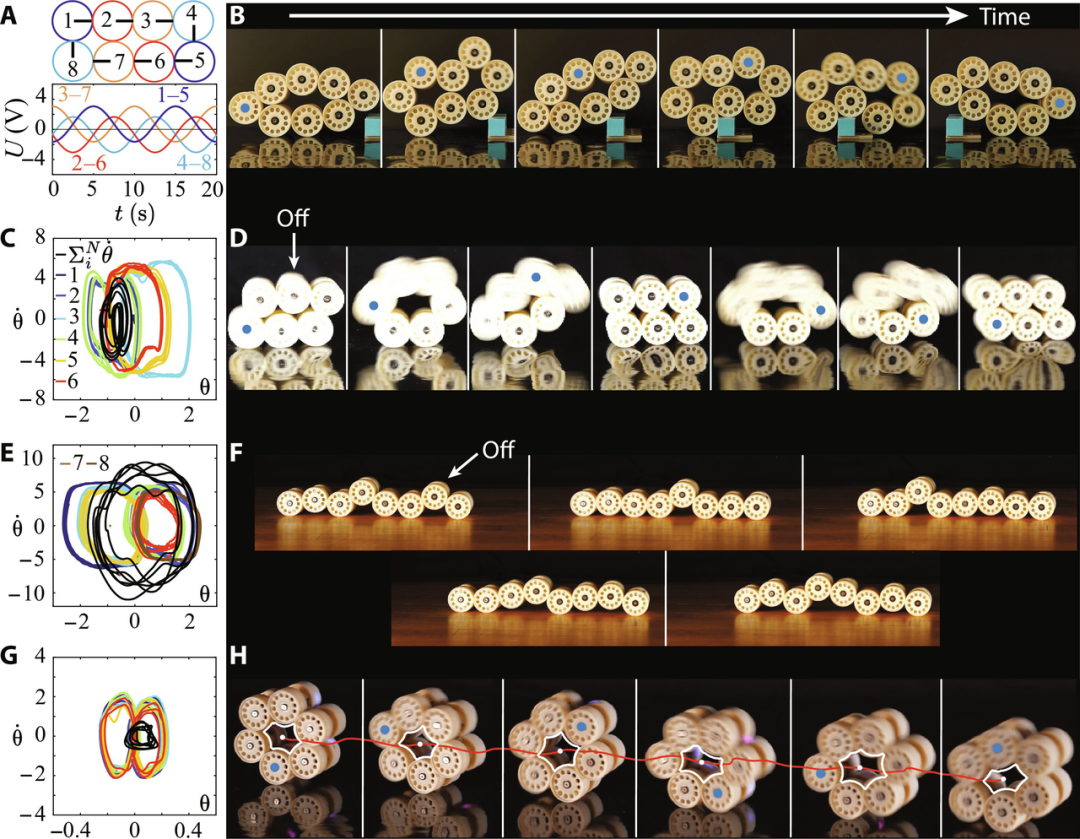
图2. Granulobot 的一些运动策略。
大语言模型与多智能体系统读书会

点击“阅读原文”,报名读书会
微信扫一扫,分享到朋友圈











