脑机接口(BCI)的概念于1973年首次提出[1]。在1999年首届国际会议上,BCI被定义为“一种不依赖于大脑周围神经和肌肉正常输出通路的通信系统”[2]。2012年,研究人员重新定义了BCI技术为“一种新的非肌肉交互通道”[3]。2021年引入了广义BCI概念,其范围进一步扩大为“大脑与外部设备之间直接交互的任何系统”[4]。
如图1所示,信号采集模块负责检测和记录大脑信号。处理组件利用专门的方法和算法分析大脑活动,解释参与者的预期行为。输出组件执行参与者的预期动作,通常通过机械臂或拼写器实现。反馈组件传达计算机对预期动作的解释,支持闭环设计。
图1. 典型BCI的系统结构。包括信号采集、处理、输出、反馈四个部分。
根据Jacques Vidal的观点[1],BCI是一种利用EEG信号的设备。在2020年,He等人[5]提出了柔性电极的分类,将其分为非侵入式、侵入式和半侵入式。在2021年,Eric等人[6]将脑机接口的信号采集技术分为三类:非侵入式、嵌入式和颅内式。这种方法考虑了传感器相对于大脑的位置以及侵入程度。
本文精心整理了现有文献,以呈现创新和全面的视角:以外科应用为重点的 BCI 信号采集技术的二维概述。
本文的研究涵盖了双重视角分析:外科手术和感官。通过综合这两个关键观点,本文建立了一个全面的分类模型,将手术考虑因素与不同传感器操作模式固有的差异彻底结合起来。在接下来的章节中,本文将阐述这两个维度的特点,并基于该模型对不同的BCI信号采集技术进行详细的比较和评估。
图2. BCI 信号采集技术的分类。 (a)为手术维度分类图,包括无创、微创、有创三个级别。(b) 为检测维度的分类图,包括非植入、介入、植入三个级别。
• 从手术维度看,该维度主要从临床医生的角度进行分类,包括三个级别:无创、微创和有创,如图2a所示。手术干预的三个维度的分类基于信号采集过程固有的侵入性程度。如果手术动作不会对受试者造成解剖学上可辨别的创伤,则该方法被指定为“无创”。如果手术造成明显的解剖创伤,则被认为是“微创”手术。如果造成微米级或更大的解剖学上可辨别的创伤,特别是进入脑组织内部,则该技术被归类为“有创”。如图3所示。
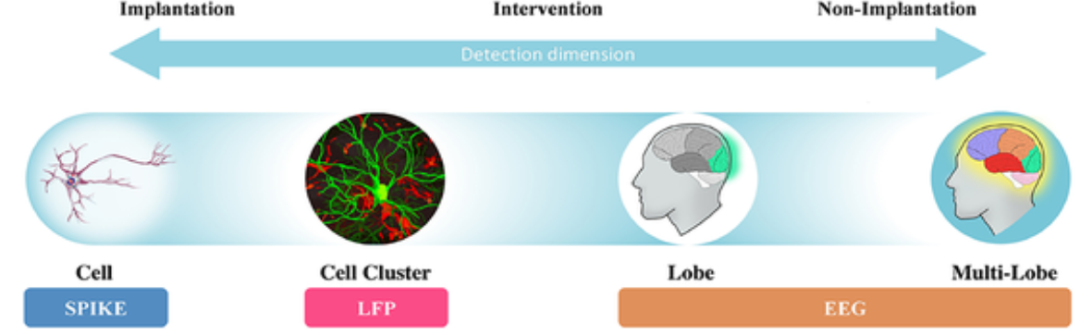
图3. 与所采集信号有关的检测维度的示意图。植入技术主要记录细胞和细胞簇水平的信号。介入技术收集来自细胞簇的信号以及源自各个大脑区域的背景信号。非植入技术产生来自整个大脑或特定大脑区域的信号。
• 从检测维度看,它与传感器的运行位置直接相关。该维度与该技术可实现的信号质量的理论上限以及生物相容性风险和其他指标直接相关。如图2b所示,分为三个级别:非植入、介入和植入。
• 从检测尺寸与信号的关系来看,目前BCI信号采集的研究主要集中在检测方面。包括植入、介入和非植入技术。植入式传感器擅长捕获精确的高频信号。介入技术缺乏与神经元的直接接触。
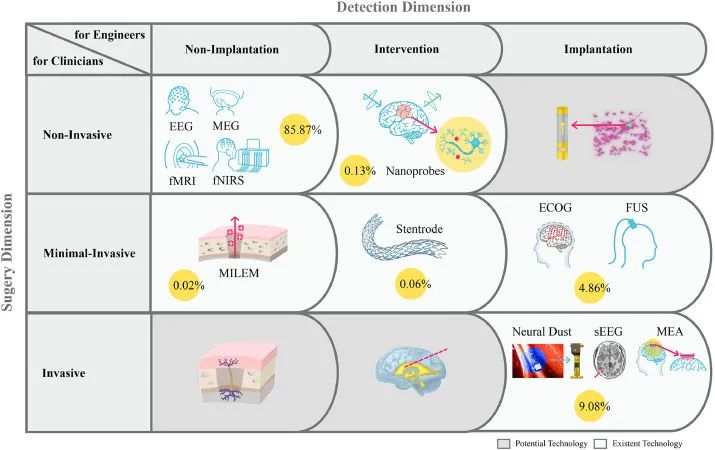
手术检测二维全景图根据上述维度将所有 BCI 信号采集技术分为九个不同的类别 (3×3)。为了进行全面细致的分类分析,本文在 Web of Science 数据库中对有关 BCI 或脑机接口 (BMI) 的文章进行了详尽的搜索。分类的结果及其相应的比例如图4所示。
图4. BCI 中信号采集技术的手术检测二维全景。它包括两个维度,总共9种(3×3)技术类型。本文调查了这十年来的 6679 篇研究文章,获得了每种技术的比例。分别是无创非植入技术(85.87%)、微创非植入技术(0.02%)、无创介入技术(0.13%)、微创介入技术(0.06%)、微创植入技术(4.84%)和有创植入技术(9.08%)。
• 无创非植入技术由于其便携性和适用性闻名,是目前使用最为广泛的技术类别。
• 微创非植入技术旨在利用微创手术解决非植入技术的技术障碍。
• 无创介入技术旨在将传感器放置在人体的自然腔中,以避免炎症等问题。
• 与无创介入方法相比,微创介入技术有助于获取更精确、更深刻的神经生理信号。
• 微创植入技术是目前新技术涌现最多的类别之一,大部分情况下可以提供直接的皮层信号。
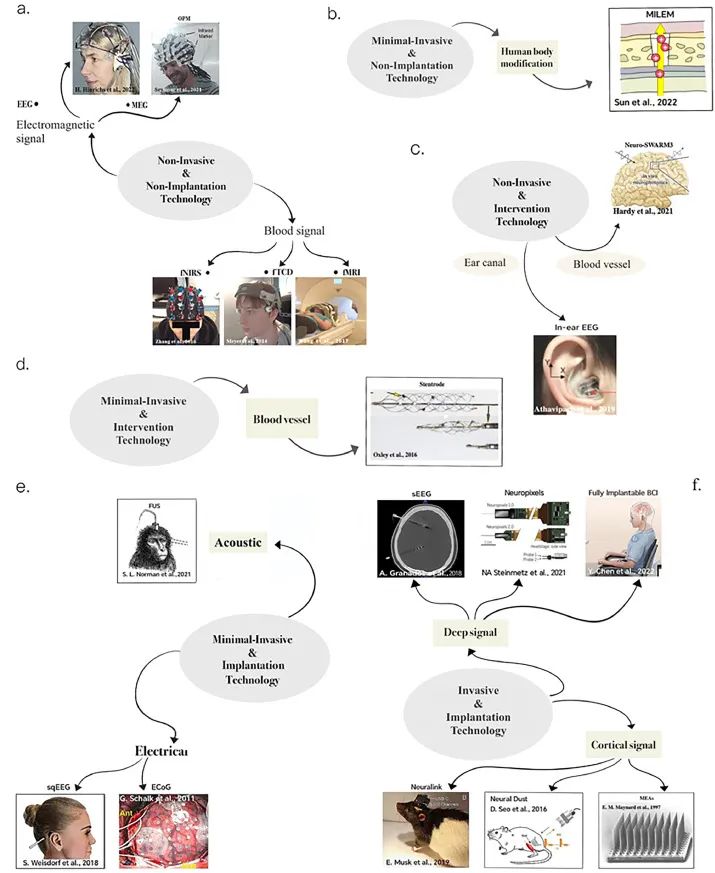
• 有创植入技术因其空间分辨率和信号带宽优势而成为当前研究中的使用第二广泛的类别,其中大多数技术可以提供其他技术类别很少能采集的深度信息。如图5和6.
图5. 每个类别的代表性技术。 (a)无创非植入技术包括电磁信号类和血液信号类。电磁信号的代表技术是EEG[7]和MEG[8]。血液信号技术包括fNIRS[9]等。(b)微创非植入技术中,MILEM[10]是该领域的代表技术。(c)无创介入技术根据植入腔体类型可分为血管类和耳道类。血管中技术是Neuro-SWARM3 [11],耳道中技术是耳内EEG [12]。(d)代表性的微创介入技术是Stentrode [13]。(e)微创植入技术包括声学和电学两类。声学范畴的代表技术是FUS [14]。电气类别的代表技术是sqEEG [15]和ECoG [16]。(f)有创植入技术主要集中在皮质和深度信号类别。皮质信号类别的代表技术是 Neuralink [17]、 Neural Dust [18]和 MEA [19]。sEEG [20]、Neuropixels [21]和完全植入式 BCI [22]属于深度信号类别。
• 无创植入技术:组织穿透纳米机器人。2019 年,Jafari等人在外部磁场引导下利用磁力钻孔将纳米机器人引入大鼠大脑的可行性[23]。
• 微创植入技术:体内组装接口。2023 年,Sha等人通过喷射注射器将纳米片胶体注射到特定的神经靶标上创建导电且可生物降解的界面[24]。Strakosas 等人通过注入复杂的前体系统,创新了无需固体基质的软导电材料的原位合成[25]。
• 有创非植入技术:活体自体神经装置。利用自体活细胞作为构建植入式电子设备的基础基质规避免疫和炎症反应[26]。
• 有创介入技术:脑室系统插管植入。电极可以通过插管植入程序引入脑室大脑系统,促进大脑活动信号从心室直接传输到外部记录设备。该方法被归类为侵入性介入技术。
本文最后探讨了脑机接口(BCI)技术未来的潜在方向。推动脑机接口走向实际应用的核心是在系统集成解决方案中开发高性能采集技术。
• 无创非植入技术引领消费电子产品。BCI 技术领域在消费电子领域提供了大量的潜在应用。跨越各个领域,包括医疗、安全操作、教育、游戏等领域都能发挥作用。
• 复杂场景下的单台设备控制需要可靠稳定的信号源。BCI 技术将其效用扩展到残疾领域之外,证明对没有缺陷的个人同样有效。
• 植入技术为医疗康复带来突破。未来,植入式脑机接口可能会超越其在帮助瘫痪患者沟通和活动方面的作用,在抑郁症等精神疾病方面也具有潜在的应用前景。
• AI在BCI信号采集中的应用。人工智能在脑机接口信号采集中的应用涵盖多个维度,影响从手术精度、电极耐用性到系统适应性和用户体验等各个方面。
本文对 BCI 技术中存在的多方面挑战进行了全面分析,强调了信号采集的至关重要性。信号采集是 BCI 系统的重要组成部分,综合考虑侵入性、分辨率、保真度、成本、可用性和安全性等因素。本文对过去十年当代文献的研究最终引入了一种创新的分类模式——“医工交叉的二维视角”。该模式系统地整合了 BCI 研究中采用的各种信号采集方法。
[1] J.J. Vidal ,Toward direct brain-computer communication, Annu Rev Biophys Bioeng, 2 (1) (1973), pp. 157-180.
[2] J.R. Wolpaw, N. Birbaumer, W.J. Heetderks, et al.Brain-computer interface technology: a review of the first international meeting,IEEE Trans Rehabil Eng, 8 (2) (2000), pp. 164-173.
[3] L.F. Nicolas-Alonso, J. Gomez-Gil,Brain computer interfaces, a review,sensors, 12 (2) (2012), pp. 1211-1279.
[4] X. Gao, Y. Wang, X. Chen, et al.Interface, interaction, and intelligence in generalized brain-computer interfaces,Trends Cogn Sci, 25 (8) (2021), pp. 671-684.
[5] G.W. He, X.F. Dong, M. Qi,From the perspective of material science: a review of flexible electrodes for brain-computer interface,Materials Research Express, 7 (10) (2020), Article 102001.
[6] E.C. Leuthardt, D.W. Moran, T.R. Mullen,Defining Surgical Terminology and Risk for Brain Computer Interface Technologies,Front Neurosci, 15 (2021), Article 599549.
[7] H. Hinrichs, M. Scholz, A.K. Baum, et al.Comparison between a wireless dry electrode EEG system with a conventional wired wet electrode EEG system for clinical applications,Sci Rep, 10 (1) (2020), p. 5218.
[8] R.A. Seymour, N. Alexander, S. Mellor, et al.Interference suppression techniques for OPM-based MEG: Opportunities and challenges,Neuroimage, 247 (2022), Article 118834.
[9] J. Zhang, X. Lin, G. Fu, et al.Mapping the small-world properties of brain networks in deception with functional near-infrared spectroscopy,Sci Rep, 6 (1) (2016), p. 25297.
[10] Y. Sun, A. Shen, J. Sun, et al.Minimally Invasive Local-Skull Electrophysiological Modification With Piezoelectric Drill,IEEE Trans Neural Syst Rehabil Eng, 30 (2022), pp. 2042-2051.
[11] N. Hardy, A. Habib, T. Ivanov, et al.Neuro-SWARM(3): System-on-a-Nanoparticle for Wireless Recording of Brain Activity,Ieee Photonics Technology Letters, 33 (16) (2021), pp. 900-903.
[12] C. Athavipach, S. Pan-Ngum, P. Israsena,A Wearable In-Ear EEG Device for Emotion Monitoring,Sensors (Basel), 19 (18) (2019), p. 4014.
[13] T.J. Oxley, N.L. Opie, S.E. John, et al.Minimally invasive endovascular stent-electrode array for high-fidelity, chronic recordings of cortical neural activity,Nat Biotechnol, 34 (3) (2016), pp. 320-327.
[14] S.L. Norman, D. Maresca, V.N. Christopoulos, et al.Single-trial decoding of movement intentions using functional ultrasound neuroimaging,Neuron, 109 (9) (2021),1554-1566 e1554.
[15] S. Weisdorf, S.W. Gangstad, J. Duun-Henriksen, et al.High similarity between EEG from subcutaneous and proximate scalp electrodes in patients with temporal lobe epilepsy,J Neurophysiol, 120 (3) (2018), pp. 1451-1460.
[16] G. Schalk, E.C. Leuthardt,Brain-computer interfaces using electrocorticographic signals
IEEE Rev Biomed Eng, 4 (2011), pp. 140-154.
[17] E. Musk, Neuralink,An Integrated Brain-Machine Interface Platform With Thousands of Channels,J Med Internet Res, 21 (10) (2019), p. e16194.
[18] D. Seo, R.M. Neely, K. Shen, et al.Wireless Recording in the Peripheral Nervous System with Ultrasonic Neural Dust,Neuron, 91 (3) (2016), pp. 529-539.
[19] E.M. Maynard, C.T. Nordhausen, R.A. Normann,The Utah intracortical Electrode Array: a recording structure for potential brain-computer interfaces, Electroencephalogr Clin Neurophysiol, 102 (3) (1997), pp. 228-239.
[20] E.M. Maynard, C.T. Nordhausen, R.A. Normann,The Utah intracortical Electrode Array: a recording structure for potential brain-computer interfaces,Electroencephalogr Clin Neurophysiol, 102 (3) (1997), pp. 228-239.
[21] E.M. Maynard, C.T. Nordhausen, R.A. Normann,The Utah intracortical Electrode Array: a recording structure for potential brain-computer interfaces,Electroencephalogr Clin Neurophysiol, 102 (3) (1997), pp. 228-239.
[22] Y. Chen, G. Zhang, L. Guan, et al.Progress in the development of a fully implantable brain-computer interface: the potential of sensing-enabled neurostimulators,Natl Sci Rev, 9 (10) (2022), p. nwac099.
[23] S. Jafari, L.O. Mair, I.N. Weinberg, et al.Magnetic drilling enhances intra-nasal transport of particles into rodent brain,Journal of Magnetism and Magnetic Materials, 469 (2019), pp. 302-305.
[24] B. Sha, S. Zhao, M. Gu, et al.Doping-induced assembly interface for noninvasive in vivo local and systemic immunomodulation,Proceedings of the National Academy of Sciences, 120 (49) (2023), Article e2306777120.
[25] X. Strakosas, H. Biesmans, T. Abrahamsson, et al.Metabolite-induced in vivo fabrication of substrate-free organic bioelectronics,Science, 379 (6634) (2023), pp. 795-802.
[26] J.A. Goding, A.D. Gilmour, U.A. Aregueta-Robles, et al.Living Bioelectronics: Strategies for Developing an Effective Long-Term Implant with Functional Neural Connections,Advanced Functional Materials, 28 (12) (2018), Article 1702969.